

The Mars Desert Research Station (MDRS), owned and operated by the Mars
Society, is a space analog facility in Utah that supports Earth-based
research in pursuit of the technology, operations, and science
required for human space exploration. We host an eight month field
season for professional scientists and engineers as well as college
students of all levels, in training for human operations specifically
on Mars. The relative isolation of the facility allows for rigorous
field studies as well as human factors research. Most crews carry out
their mission under the constraints of a simulated Mars mission. Most
missions are 2-3 weeks in duration, although we have supported longer
missions as well. The advantage of MDRS over most facilities for
simulated space missions is that the campus is surrounded by a
landscape that is an actual geologic Mars analog, which offers
opportunities for rigorous field studies as they would be conducted
during an actual space mission.
Campus
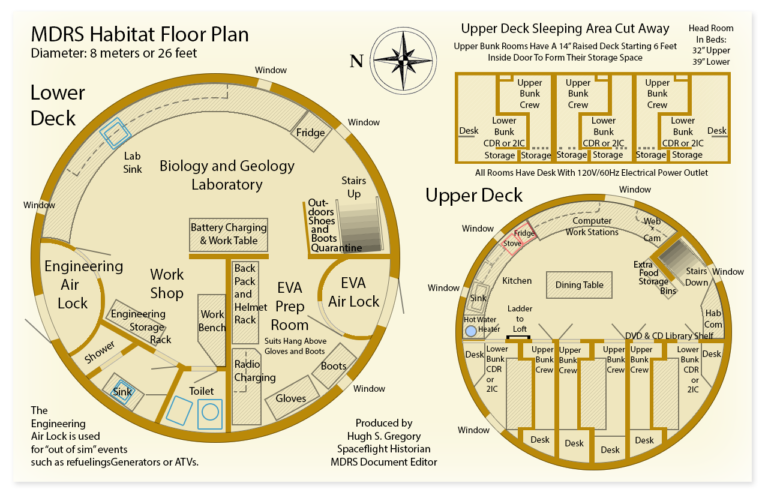
The MDRS campus includes six structures. The habitat (Hab) is a two
story 8 meter in diameter cylindrical building constructed in 2001.
It can house seven crewmembers at one time. The structure has been
undergoing a refurbishment over the last few years. The lower deck
houses the EVA prep room with the spacesuit simulators, an exterior
airlock, a shower room, toilet room and a rear airlock leading to
tunnels, which access other structures. The upper deck houses the
living quarters, which include a common work/living area, fully
operational kitchen and seven staterooms with bunks. Six of the
staterooms are on the main floor, a seventh is housed in the loft.

There are two observatories on campus. The Robotic Observatory houses
a 14″ Celestron Schmidt-Cassegrain telescope on a CGE pro equatorial
mount. Attached is a 4″ refractor, which is used as a guide scope.
Either telescope can utilize a wide array of cameras for astronomical
imaging. The telescope is housed in a 7.5 foot automated dome that
can be controlled on site or from the habitat module. The Musk
Observatory, formerly the only observatory on campus, has been
converted into a solar observatory for use by crews.
More about the MDRS Observatories

The GreenHab was fully funded by donations. It is a 12” by 24” foot
structure, housing both conventional and aquaponic growing systems, in
addition to space devoted to crop research studies. It is climate
controlled though a propane heater and swamp cooler, and has broad
spectrum grow lights of additional light during the winter months.

The Science Dome is a 7-meter in diameter geodesic dome that contains
our solar system’s control center and is a functional microbiological
and geological laboratory.
The RAMM (Repair and Maintenance Module) is our newest building, and
will be on site before the beginning of 2018. A refitted Chinook
helicopter, this spectacular addition to the campus can house an
ATV/rover for repairs and will be used for engineering research.

All of the structures with the exception of the Robotic Observatory
are linked with the Hab via above ground tunnels to allow participants
to utilize these buildings while remaining in simulation. The campus
is powered by a 15 kW solar system that feeds a 12 kW battery bank
that provides power to everything. A 12 kW generator autostarts when
the campus uses more power than the solar can provide in the winter
months.
Crews occupying the station are fully supported. The station is
operational with all systems functional during their stay.
Shelf-stable foods such as those used on space missions are supplied
for each crew. Additional support equipment includes five All Terrain
Vehicles and four all electric two person Polaris Rangers for field
transportation, as well as a 4 wheel drive SUV. The director lives on
site and manages the station and operations. In addition, there are a
host of volunteer teams supporting all aspects of the work that is
done at the station, including peer review of all research proposals
and supporting crews via offsite Mission Support.
MDRS began operations in 2001 as a fully volunteer enterprise. Over
1,000 people have participated as crew and many are now involved in
other analog studies at different places around the world. Thousands
of other people have supported our mission in many other ways, all of
them dedicated to the idea of sending humans to Mars.
You must be logged in to post a comment.