[category science-report]
Crew 310 End-Mission Research Report
Submitted on: SOL 12
Date: February 14, 2025
Astronomy
Ariadna Farres Basiana (Crew Commander & Astronomer) is combining her management responsibilities at the MDRS with two research projects. Her astronomy project is:
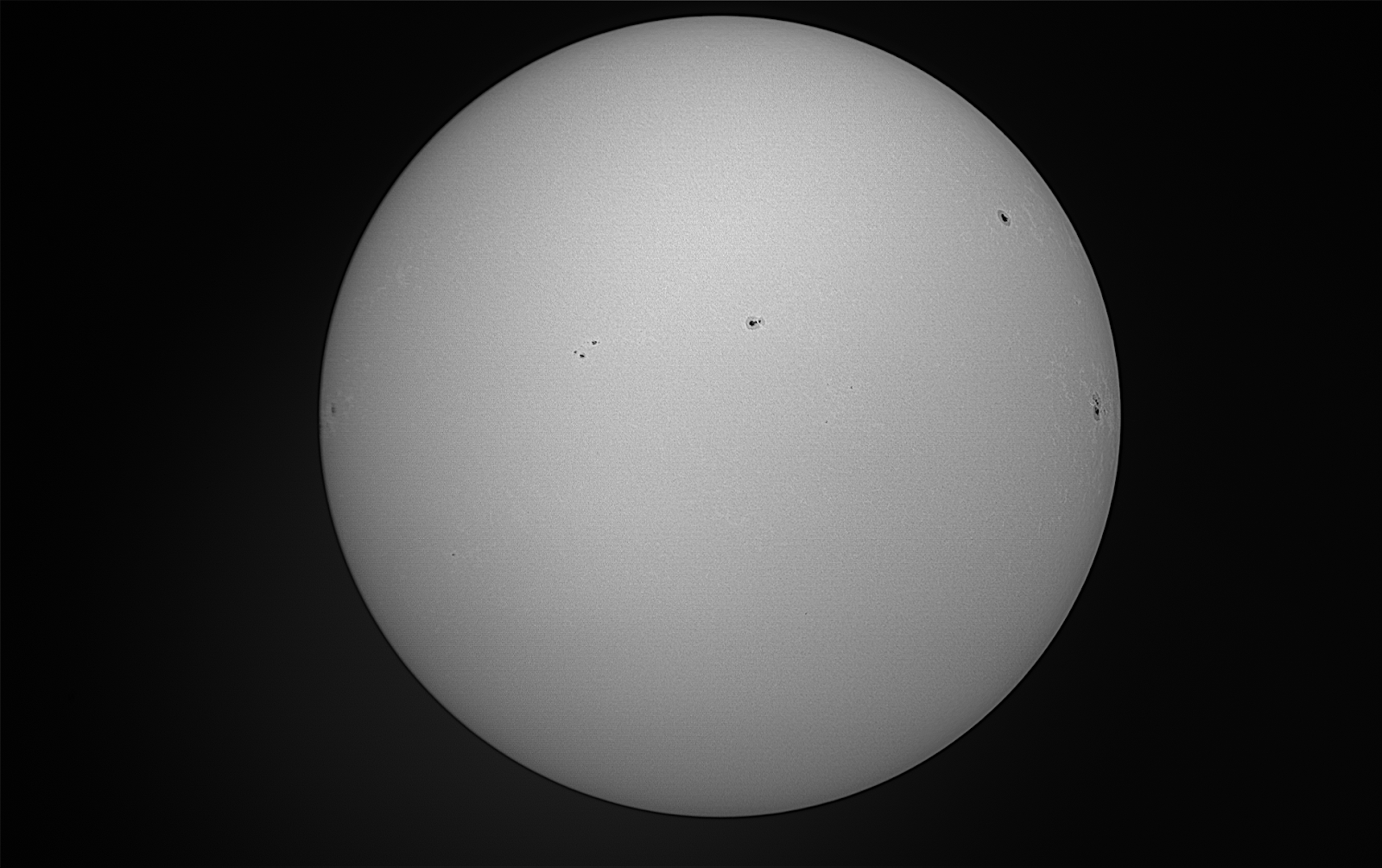
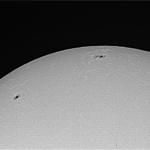
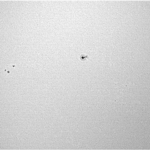
Monitoring the Sun activity from Mars: The main goal of this project is to observe the Sun from the Musk Observatory, monitoring the evolution of sunspots and prominences. Astronauts on Mars will be affected by solar radiation, given the thin atmosphere of the red plane.
The weather was not always favorable during this mission, either too windy or cloudy, and we were able to observe the Sun only 5 days through the 12 sols. The evolution of the Sunspots was tracked, images were processed. The crew astronomers tried to find Prominences without success. Most of the chronosphere images were processed and patterns will be analyzed in the future.

Helena Arias (Crew Engineer) is combining her duties as engineer with different research projects. Her astronomy-related project:
Astrophotography on Mars: This project aims to capture images of the Martian sky for scientific outreach and educational purposes across diverse audiences. The images are obtained using the RCOS 16" Ritchey-Chrétien telescope, which is well-suited for deep-sky observations due to its high-resolution optics and advanced tracking capabilities.
One of the primary goals of this initiative is to engage the public, students, and researchers in the exploration of celestial objects beyond Earth. By capturing high-quality astronomical images of stellar objects that have curious names, we aim to contribute to a broader understanding of deep-space structures while fostering interest in astrophotography and scientific research. The images obtained will be used for educational purposes, allowing students and enthusiasts to study cosmic formations and enhance their knowledge of astronomy.

Despite persistent cloud cover over New Mexico, observations have been successfully completed for several deep-sky objects. Messier 82, also known as the Cigar Galaxy, was imaged twice. Located approximately 12 million light-years away in the constellation Ursa Major, M82 is an irregular starburst galaxy undergoing intense star formation. The second imaging session produced a significantly improved image, capturing the dynamic structure of its core, shaped by stellar winds and supernova activity.
In addition to M82, several nebulae have been observed. NGC 2174, or the Monkey Head Nebula, is an emission nebula in Orion, known for its intricate structure and active star formation. NGC 2237, part of the Rosette Nebula, is an expansive H II region in Monoceros, where young, hot stars ionize surrounding hydrogen gas, creating a glowing structure. NGC 2359, also called Thor’s Helmet, is a Wolf-Rayet nebula in Canis Major, characterized by its bow shock structure caused by powerful stellar winds from a massive central star. NGC 2264, which includes the Christmas Tree Cluster and Cone Nebula, features a mix of an open star cluster and dark nebulae, highlighting ongoing stellar formation in Orion.
While these initial observations have been completed, additional post-processing is necessary to fully refine the images. Some datasets still require processing to incorporate H-alpha and Luminosity (Lum) filters. The H-alpha filter will enhance hydrogen emission features, making details in nebulae more prominent, while the Lum filter will improve overall contrast and depth. Additionally, stacking multiple images taken with the same filter is necessary to reduce noise and enhance faint structures. This process significantly improves image clarity, revealing fine details that are otherwise lost in single exposures.
By refining imaging techniques and increasing public access to these images, this project will serve as a valuable resource for educators, students, and astronomy enthusiasts alike. Future efforts will focus on processing and analyzing the collected data to extract meaningful scientific insights while continuing to share the wonders of the universe with a global audience.
Geology
Marina Martinez (Green Hab Officer & Biologist) is combining her daily responsibilities in the GreenHab together with different research projects. Her main research project:
In-Situ Analysis in Sample Return Missions: Optimizing Space Exploration:
The goal of the project is to optimize future sample-return missions to the Moon and Mars using instrumentation in situ to collect only highly scientific valuable samples, prioritizing the quality of the collected samples over the quantity. One of the main problematics faced with Apollo samples is that most samples are not suitable for certain types of analyses, for example. Another issue is to determine the origin of alteration products in samples, which may be lunar or caused by extralunar processes. Therefore, the present project aims to end with some of these problems and proposes an approach based on analyzing the composition of samples in situ.
We are using two instruments to obtain the chemical compositional of the collected samples. The first one is the Vanta Max, a portable X-ray Fluorescence analyzer provided by Evident Scientific (Olympus). This instrument allows real-time XRF data in the field during EVAs, which offers preliminary analyses that help decide whether a sample is worth collecting. The VANTA comes with a Workstation that allows working in the lab in a stationary form using a laptop, which was settled in the Science dome. During the first part of the mission, we experienced trouble with the instrument because the batteries were damaged. Fortunately, the company responded fast and sent a replacement unit to the MDRS, which arrived in the evening of Sol 5 (Feb. 7). The Vanta has been used in four EVAs.
The second instrument is the Spectroscout energy-dispersive (ED) XRF, which is settled in the Science Dome and has remained there the whole mission, as this is not a handheld XRF. The SCOUT is ideal for geological samples because it is fitted with a vacuum pump and a sample spinner. It can analyze powder samples for the elements Na-U. The vacuum atmosphere results in better sensitivity for the light elements Na-Cl. The samples need to be powdered; thus it is particularly effective for studying muds and shales from the MDRS area. The results from this instrument guided final decision on which samples will be returned to Earth.
The combination of both instruments is ideal and offers several advantages for sample-return missions:
Pristine analyses: The results obtained in situ have no contamination from the Earth’s atmosphere
Flexibility: The mission can be adjusted based on the obtained results
Cost efficiency: Less samples are brought back to Earth (less weight)
Geoconservation: It is a much more respectful way of collecting, minimizing the environmental impact.
The Crew Geologist analyzed samples from a total of 12 different sites and performed numerous analyses (~40) using both instruments. Some of the highlights are the finding of a Sr-rich vein (33 wt% Sr) in Marble Ritual. The vein also contains Sulfur, Silicon, and Barium, which suggests the presence of two minerals (barite and a Sr-rich mineral) given the dark-patches that are observed in hand sample. Interestingly, alteration Fe-rich oxide nodules have also been found in this area. Another example is the identification of two-colored sandstones high in P concentrations (7.5 wt%), which would be useful for dating.
Recommendations for future lunar and Martian exploration include addressing potential equipment issues (e.g., battery reliability), the use of specialized gloves, and providing a new methodology that promotes sustainable space exploration practices.
In conclusion, different shales/mudstones, sandstone/limestones, and conglomerates shape the landscape around the MDRS area, forming buttes and mesas. The shales have been mapped using the SCOUT, layer by layer, showing that they are silica-rich and vary in different concentrations of potassium, iron, magnesium, calcium, and sodium, with low concentrations of fosforus. Individual minerals and rocks have been analyzed using the VANTA, where agates, gypsum, barite, feldspar, and other minerals rich in alkaline-earth metals are also found throughout.


Engineering
Monica Roca i Aparici (Mission Specialist) is assisting the Crew Engineer of the mission and performing several projects. The engineering project is her main project:
Simulating Satellite Calibration orbiting Mars Using Corner Reflectors (with Sentinel-3 A&B): This project aims at installing a Corner Reflector at the MDRS, to calibrate Earth-orbiting satellites like the Sentinel-3 A&B using advanced radar techniques, likewise we will calibrate Mars orbiting satellites.
The Corner Reflector structure was installed early in the mission. It was fixed to the ground, on the concrete patch behind the station. The plates over the structure were screwed to the structure with bolts. The GNSS antenna was initially mounted in the middle of the reflector, and connected to the receiver inside the HAB, with a coaxial cable. The receiver was, in turn, connected to a Raspberry Pi to ensure the constant push of the RINEX files with the outside world. The right functioning of the setup was proven and so it was the content of the RINEX files, with the correct reflector location. The receiver was also configured with the final parameters.
A few days later, the antenna was removed from the middle of the reflector and moved to its final configuration, located right outside the reflector, attached to it with 3 bars that hold a pole with the antenna on top. The coaxial cable was fixed to the ground with pegs.
Finally, we have arranged the internal (HAB) hardware (receiver, raspberry and ethernet switch) and their cable connections, in a neat way. The HW is located inside a 3D printed box.



MDRS 3D mapping using a drone:
We have flown a drone over the MDRS in a particular pattern that allows a 3D reconstruction of the images. The SW used for this reconstruction is, at the moment, a simple one available on Mars (see image below). Once we are back to Earth, we will use a more professional SW that will use all the available data and produce a more precise and complete 3D map.

Helena Arias (Crew Engineer) is combining her duties as engineer with different research projects. Her astronomy-related project:
3D printing tools on Mars. This project explores the application of additive manufacturing techniques in an analogue Martian environment at the Mars Desert Research Station (MDRS). Over the course of 12 SOLs, the 3D printer has been operating continuously, successfully producing more than 120 printed components for multiple research, engineering, and outreach initiatives. The ability to manufacture tools and structural components on-site has demonstrated the potential of 3D printing as a critical technology for future space exploration.
The study began with a focus on structural optimization, particularly in relation to solar panel support systems. To assess durability and efficiency, test objects were designed and printed to improve resistance against environmental factors such as wind and dust. These prototypes were installed outside the habitat during extravehicular activities (EVAs), allowing them to be subjected to real-world exposure in a desert environment that mimics some of the harsh conditions expected on Mars. The data gathered from this experiment will contribute to the development of more resilient solar infrastructure for future missions.
Beyond structural applications, the 3D printer has been extensively utilized for the fabrication of functional tools. Among these are geological research instruments designed to assist in rock and soil sample collection during fieldwork. The ability to print such tools on demand is a major advantage in a remote and resource-limited setting. If a tool breaks or proves ineffective, modifications can be made, and a new version can be printed within hours, reducing dependency on pre-supplied equipment and showcasing the adaptability of additive manufacturing in planetary exploration.
Additionally, the project has played a key role in educational outreach by printing innovative designs created by students. Some tools from a student competition were successfully designed and fabricated, highlighting the potential of 3D printing in inspiring young minds. The winning design was a test tube carry-on accessory, a practical device for securely holding and transporting test tubes during sample collection. This tool has significant applications in planetary fieldwork, as it allows researchers to efficiently manage and protect their samples while working in extreme environments.
The continuous operation of the 3D printer throughout the mission has also provided valuable insights into its reliability under analogue conditions. The successful production of over 120 parts demonstrates that 3D printing is not only feasible but also highly effective for in-situ manufacturing in space analogues.
Estel Blay (Health and Safety officer & Scientist) is combining her health and safety responsibilities at the MDRS with outreach and engineering projects:
Enhancing Solar Panel Efficiency for Dusty Mars Environments: The goal of the experiment is to analyze different mechanisms for reducing the impact of Martian dust on solar panels. The experiment involves two types of analysis: one structural and the other focused on coating options. Two different structures were designed prior to the mission and are being printed using a 3D printer at the MDRS, employing origami techniques. One of the designs was installed next to the sun observatory, with one structure folded and the other unfolded. The second design encountered some 3D printing issues, prompting the engineer to redesign the top part of the vertical structure. Both the engineer and the HSO discussed alternatives for deploying the vertical design to ensure its safety during windy evenings.
Every day, the crew captured images of the design to identify any hotspots where dust accumulates. A thorough analysis of these images will be conducted in collaboration with Dr. Guler Kocak to improve the design after the mission.
The coating experiment was set up outside, near the MDRS solar panels. One of the sets had some issues with the battery, so it was reinstalled next to the solar observatory each morning to capture data, using both the computer and the battery simultaneously. This data will support the analysis of different coatings, helping us understand how the origami-designed panels might be covered in the future.
The images below show the coating experiment deployed next to the solar panels, as well as the butterfly origami design.

Ariadna Farres Basiana (Crew Commander & Astronomer) is combining her management responsibilities at the MDRS with two research projects. Her engineering project is:
Mars Instrument Deployment Test: This is part of a collaboration between the Hypatia crew and NASA Goddard’s Exploration & In-space Services and Heliophysics engineering group. The goal is to provide feedback on a deployable support system that is being developed for future Lunar and Mars exploration missions. The crew has taken the support system during the EVAs and tested how easy it is to put it on and off the rovers and place it near an area explored during an EVA.
This EVA support system has two handling configurations, a double side handing and a single handle on the top. The crew tested walking up to 200m with each configuration and determined that for most astronauts the double side handling was more stable when walking large distances and easier to put on and off the rover.
Human Factors
Helena Arias (Crew Engineer) is combining her duties as engineer with an engineering, a human factor and an astronomy-related project. The human factor project:
Assessing Muscular Weight Loss On Analogue Missions: This project aims to analyze muscular weight loss in female astronauts participating in a two-week analogue mission at the Mars Desert Research Station (MDRS). Understanding how muscle mass evolves in a controlled, isolated environment is essential for improving physical training protocols and nutritional strategies for future long-duration space missions. To mitigate muscle loss, the crew has followed a structured physical preparation plan combined with daily nutritional guidelines tailored to support overall muscle health.
A key component of this study has been the continuous monitoring of heart rate variability (HRV) using Garmin smartwatches. HRV is a valuable physiological marker that provides insights into stress levels, recovery, and overall cardiovascular function. By tracking HRV throughout the mission, researchers aim to understand how the simulated Martian environment, physical exertion, and dietary intake influence the autonomic nervous system and muscle preservation.
In addition to HRV data collection, the crew has undergone periodic physical assessments to evaluate their muscular condition over time. These assessments include body weight measurements and a short strength test, both of which have been conducted three times during the mission. This multi-phase testing approach allows for a comparative analysis of muscular changes throughout the analogue mission.
To maintain muscle mass, the crew has successfully completed 30 minutes of structured exercise every morning, ensuring consistent physical activity despite the challenges of operating in an isolated environment. The exercise routine includes a mix of resistance training, bodyweight exercises, and cardiovascular movements designed to counteract potential muscle atrophy associated with reduced mobility and altered daily activity levels during the mission.
While further analysis is required, provisional results do not indicate a clear loss or gain of muscular weight among the crew members. This suggests that the combination of daily exercise and optimized nutrition may be effective in maintaining muscle mass during short-duration analogue missions. However, additional factors such as hydration levels, calorie intake variations, and individual metabolic differences need to be examined to draw more precise conclusions.
Beyond its immediate implications for astronaut health, this study provides valuable insights into how structured exercise and dietary strategies can help mitigate muscle loss in isolated and confined environments. The results of this study could help shape future recommendations for muscle preservation strategies in spaceflight, ensuring that astronauts maintain optimal physical health during extended stays on the Moon, Mars, and beyond.
Monica Roca i Aparici (Mission Specialist) is assisting the Crew Engineer of the mission and performing an engineering and a human factors project. The human factor project:
Monitoring female body behaviour under (semi)extreme conditions: Female body and its reaction to extreme or semi-extreme conditions are not well understood. Studies on human factors have typically been based on male body. There is a lack of information and data regarding female behaviour under certain conditions that are not common daily on Earth but astronauts have to face during the astronaut daily life, and more in particular during the space walks or extravehicular activities.
The MDRS is a perfect place to carry out this study, particularly during EVAs, where hard work or long walks are performed. We are gathering data from the Hypatia II crew 310, during all EVAs using a Garmin watch. These data will be analysed by Human Factor research centres such as the Barcelona Institute of Global Health, ISGlobal, (https://www.isglobal.org/en/) as soon as the Hypatia II mission is concluded.

Biology
Estel Blay (Health and Safety officer & Scientist) is combining her health and safety responsibilities at the MDRS with outreach and engineering projects:
Space Tomato Seeds: This project was created in collaboration with the British School of Barcelona, where the girls from Year 11, with the support of the HSO, designed an experiment to evaluate the growth of tomato seeds as part of the Tomatosphere initiative. This initiative sends tomato seeds into space aboard the ISS and provides two sets of seeds to school groups (those that have been to space and those that haven’t) for them to analyze the growth of the tomato plants and try to determine which seeds are which.
The HSO set up the experiment, which will evaluate the effect of different types of water (clean, filtered, and grey water) on the tomato seeds, as well as the amount of light. The experiment has been deployed in the green hub using pots and petri dishes, completely independent of the ones already part of the MDRS.
Based on the experiment results, the tomato seeds from Group X grew faster than those in Group Y under all conditions tested. The filtered water has shown promise as a viable option for watering the plants, as those seeds were the first to germinate, suggesting positive effects on seed growth. The different lighting options revealed that seeds planted without access to enough light did not germinate at all. We have concluded that Group X shows the most potential for space travel. The crew will contact Tomatosphere with these conclusions to verify the results.

The images below show one of the small green hubs used to filter the amount of light the plants are receiving, the small pots containing the tomato seeds, and the three types of water used in the experiment.
Sustainability and scientific communication
Jennifer García Carrizo (Crew Journalist) reported on the field the experience of the Hypatia II crew at the MDRS, performing the daily journalist reports and sending the “Photograph of the day”, requested by the MDRS. She has a project related to sustainability:
Hypatia’s Circular Odyssey: An interactive website featuring a digital twin of the MDRS that showcases various videos on sustainable practices and the circular economy implemented at the station. Its goal is to highlight daily actions that ensure the mission’s sustainability and offer inspiration for similar efforts on Earth. Thus, the entire base has been scanned, both inside and outside.
The exterior of the base and its surroundings have also been scanned, and several sustainable practices have been recorded: use of the composter, sports and food routines, water management, use of the reflector installed at the base, use of sustainable clothing that requires no ironing, repels odors and dirt and can be worn longer without washing, solar panels and how they work, type of food consumed at the base, water management at the station: how we shower and how we wash the dishes, use of the Astrocup menstrual cup, collection of sustainable recollection of geological samples and use of 3D printing for printing contingency materials. Finally, a general video presentation of the project about the circular economy and sustainability has been recorded.

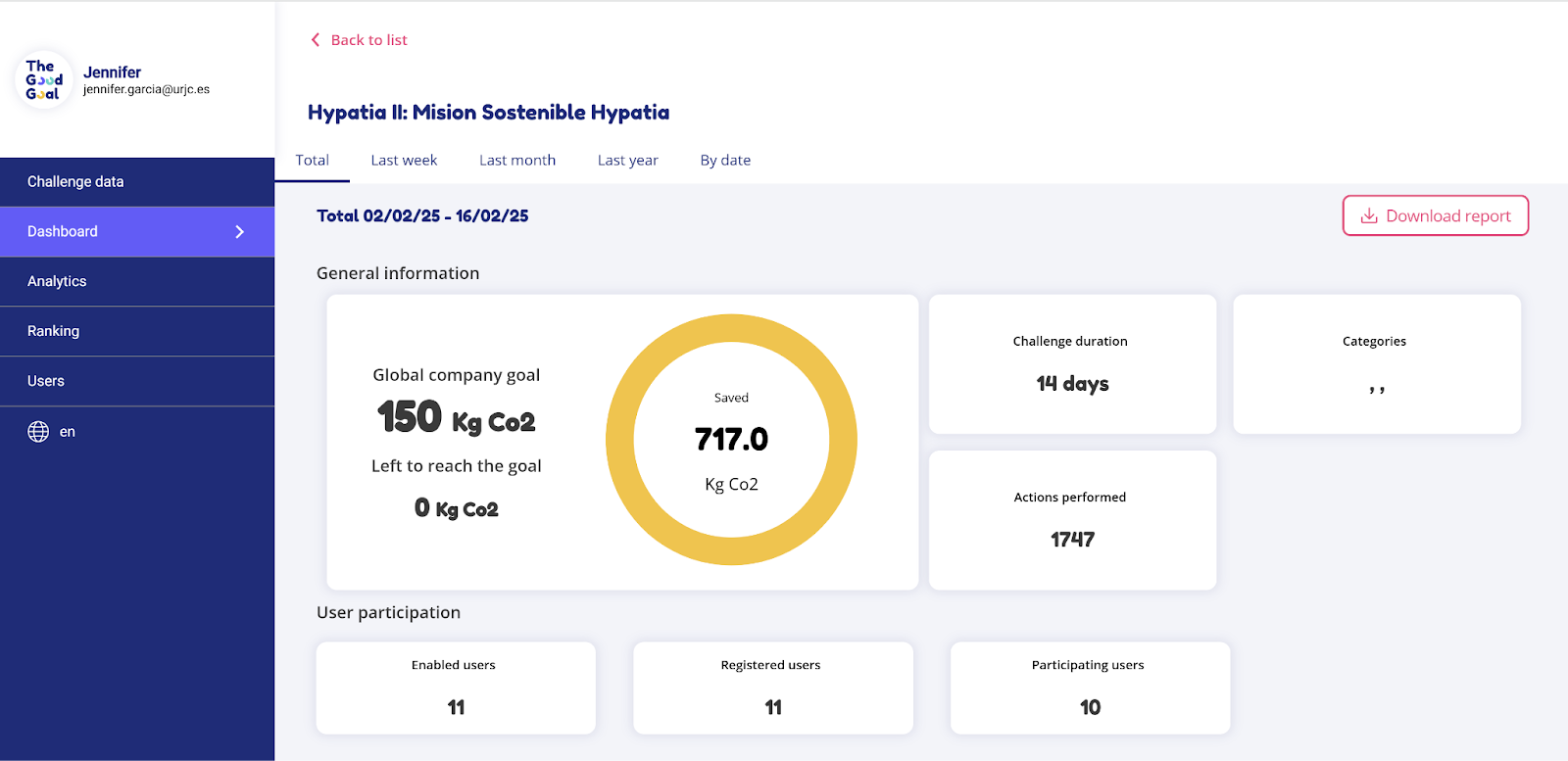
Besides, each day, the crew also reported their sustainable practices through The Good Goal App. The Good Goal is a mobile application designed to help individuals and organizations adopt more sustainable habits by providing personalized weekly challenges. By engaging with these challenges, users can reduce their environmental impact in areas such as waste, consumption, and transportation. The app offers reliable data on savings in CO₂ emissions, water usage, and waste reduction, allowing users to track their ecological footprint The Good Goal App has been recognized as the Best Digital Solution in Spain in the Sustainability category 2023 by the United Nations (UN).
According to the register done in the app, during their stay in the MDRS, the crew saved more than 720 kg of CO2, 11.000 liters of water, 96.5 kilos of waste, and more than 990 kW, compared to an “ordinary” citizen.
Back to the “Earth”, the crew journalist will work on editing all the videos, including the 360 ones, to create the virtual tour about the MDRS, which will be allocated at the project´s website: https://xrlab.ciberimaginario.es/project/hypatia-comunication
Finally, it is important to highlight that branding for this communication project has been designed too. Please, see the photo below.

Outreach and Communication
Anna Bach (Crew Executive Officer & Resident Artist) is combining her XO responsibilities at the MDRS with conducting several outreach and art projects:
Macro art by satellite: We planned to set up the macro piece of art between the first and the second Sols, using one EVA to set up the references with strings, and a second EVA to unfold the fabric. The plan was to leave the piece of art there for the entire mission, so that as many satellites as possible could pass over it during our mission. This way, we could ensure that we got the picture before retrieving the fabric.
However, in the first EVA, we noticed the wind would not allow for this plan. In fact, the wind didn’t let us set up the fabric in the first place, it was too strong and we had to abort and come back to the base.
Upon doing some thinking, we decided to modify the art piece from a “foot print” 65x35m long to a “cross” 40x40m. We also decided to wait for a less windy day, and set up the art piece right before the satellite pass. On the 6th Sol, we got lucky, and we got a very calm day with 2 satellite passes. We were able to set up the art piece early in the morning, and take it out on the afternoon, to avoid that stronger winds take out the fabric and carry it away.
We were able to capture some pictures with a drone as well. We are now waiting for the satellite image that is to be provided by OpenComsos, the company we are collaborating with.

Children’s book: The purpose of this project was to draw a children’s book based on the real installations of the MDRS, the members of the crew and the projects we are carrying out.
During these two weeks Anna has been able to the crew members, all the installations of the station and other items of interest such as the rovers, the spacesuits and the walkie-talkies. She has also drawn several martian landscapes and painted them with watercolors.

Estel Blay (Health and Safety officer & Scientist) is combining her health and safety responsibilities at the MDRS with outreach and engineering projects:
Spacetouille – Space Menu for Astronauts: The Singaporean organization Space Faculty created the International Space Challenge, proposing the task of designing a delicious menu for astronauts that contains all the nutritional values they require in a day, to be prepared and eaten by the Hypatia crew during their simulation at the MDRS. The winning team, made up of four children aged 8 to 9 years old from Singapore, wanted to incorporate part of their culture into the design of the menu. Everything was dehydrated and vacuum-sealed. The Hypatia crew commander prepared the entire dehydrated menu before the simulation.
The menu consisted of:
Breakfast: A protein bar made primarily from nuts.
Lunch: Singaporean rice balls and lentil soup.
Dinner: Bolognese pasta and beef stew.
Snack: Sweet potato snacks.
The crew had the menu on Sol 3 and will provide feedback based on a set of questions created by the kids, which will help them analyze any potential improvements to their design. The experiment was integrated into the nutritional plan designed as part of the exercise and nutrition routine tailored to the Hypatia crew’s specific nee
The image below shows the Crew Commander and HSO before preparing the dinner.

Marta Ferrer is the filmmaker of the crew. She has mostly been working on her documentary:
During the mission Marta has been recording the daily life of the crew, as well as their projects both inside and outside the station. This includes: preparation of meals, preparation of EVAs, EVAs, installation of the macro piece of art, the installation of the reflector, analysis of rock samples in the Science Dom, Green Hab tasks, among others. She has also interviewed the crew, getting to know more about their stay and their projects.















You must be logged in to post a comment.