[category science-report]
End of Mission Research Report
Crew 268 – All Woman Crew, Mars Society
November 13-26, 2022
Crew
-
Commander: Dr. Jennifer Hesterman (United States)
-
Executive Officer/Scientist: Jas Purewal (United Kingdom)
-
Health and Safety Officer: Elizabeth Balga (United States)
-
Biologist & Greenhab Officer: Caitlyn Hubric (United States)
-
Engineer: Judith Marcos (United States)
-
Journalist: Izabela Shopova (Bulgaria)
Below is a detailed summary of research activities conducted during the mission.
Jenni Hesterman (CDR)
Conducted crew education regarding strategies to enhance knowledge of self and maximize success working in diverse groups in a remote, austere environment. Training sessions included how to take and use the Myers-Briggs Type Indicator and the VARK Learning Preference Tool. Led roundtable discussions regarding leadership, followership and mentoring skills in the analog environment. Delivered a crisis leadership and communications module and conducted a tabletop emergency response exercise. Led a team communication exercise using Legos. Supported the Intertribal Space Conference with a crew video, and Beta tested the new Space ABC nutrition app. At mission end, the crew discussed reintegration and strategies for reengaging in our personal and professional lives when the mission concluded.
Jas Purewal (XO/SCI)
The emotion study surveys have been submitted and will be analysed post mission. QI of the use of the PARO therapeutic robot for mitigating feelings of stress and isolation was completed and will be extremely useful in supporting research on future analog missions.
Training of VR first aid was completed successfully. Three splinting scenarios were carried out by each crew member.
Emergency rescue scenarios were conducted and the crew’s response was very good. Many lessons were learned.
Elizabeth Balga (HSO)
Orchestrated multiple emergency scenarios (including habitat- and EVA-based) with XO to observe crew application of knowledge from VR first aid training, adherence to station and EVA protocols, team problem solving, and overall emergency response. Following each exercise, the crew participated in debrief sessions where several lessons learned were captured.
Supported and maintained crew health and safety throughout the mission, including several minor ailments and injuries. Evaluated the research station for health and safety strengths and weaknesses and compiled a list of opportunities for improvement, including gaps in medical equipment and training.
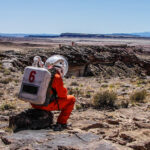
Evaluated both the one-piece and two-piece spacesuits during EVAs (during field operations, rover usage, etc.) to identify strengths and weaknesses for each and inform future EVA spacesuit and tool design choices, as well as protocols and procedures.
Captured photo and video footage from around the habitat, during suit up, and during EVAs to use in future outreach presentations.
Caitlyn Hubric (BIO/GreenHab)
Sample Collection
I brought 50 falcon tubes with me and I am leaving with 50 unique samples. I have included a table below that shows the sample type and the quantity as well as the different regions I explored and the quantity.
|
Totals |
|
Lichen |
11 |
White Rock Canyon (WRC) |
19 |
|
Plants |
14 |
The Peanut (P) |
6 |
|
Root Soil |
8 |
The Overlook (OL) |
3 |
|
Regolith |
9 |
Sea of Shells (SOS) |
6 |
|
Ice |
4 |
Cowboy Corner (CBC) |
7 |
|
Mud From Next to Ice |
1 |
Special Region (SR) |
9 |
|
Small Pebbles From Hill Formation |
1 |
Total |
50 |
|
Wet Dirt From Shaded Hole |
1 |
|
|
Old Water Reservoir Wall |
1 |
|
Total |
50 |
I collected Lichens because they are able to survive in rocky regolith-like conditions and I would like to study them further as this might help us in our future efforts to use resources already present on Mars, like the regolith.
I collected small samples from different plants I found growing in regolith-like conditions. I collected branches, leaves, and when possible, flowers. I also collected samples of soil from around the roots of different plants. I am going to inspect these samples and attempt to find and isolate microbial life, if any, that I find. I hope to find a microorganism that helps promote plant growth and/or water stress tolerance in these desert conditions.
I have collected different samples of regolith from multiple different locations. I plan to test the pH and NPK values of these samples and compare them to regular dirt and the simulated Martian regolith I work with from the exolith lab (MGS-1 Regolith Simulant).
I will be traveling with these samples back to my lab and using the equipment there to continue my assessment of these samples.
Decomposition Research
I set up 3 different compositions of substrate for my decomposition study. In method 1, I combined wood pellets, brown rice, dead edible plants, and grain spawn. For method 2, I combined wood pellets, dead edible plants, the roots and dirt surrounding the roots of the dead plants, and grain spawn. For method 3, I collected organic waste generated by the crew for the first 5 days of the mission and liquid spawn. The organic waste included coffee grinds, leftover bread/breadcrumbs, cardboard, and other inedible food waste.
All 3 of my methods were successful in decomposition but unsuccessful in generating food for the crew. Around day 9, I saw the presence of contamination which is very common in mushroom farming. The contamination was a green mold, which I have battled in my research back in my lab and commercial growers battle regularly. This mold doesn’t completely stop the fungi from decomposing, as I saw here, but the presence of mold means any mushrooms grown cannot be guaranteed to be safe for human consumption. Once you are able to see the contamination with your eyes it is usually not saveable, so I decided to let it grow and continue monitoring it. In my method 3 that had organic waste, the fungi and mold worked together and are still decomposing, but will likely not make it to the fruiting phase. In a colony setting, this wouldn’t be a complete loss. You could allow the two organisms to continue decomposing and then sterilize it at the end and still use it as a fertilizer/additive to your soil.
The speed at which my fungi began to colonize the substrate leads me to believe that edible decomposers can be a valuable addition to a colony’s greenhouse for multiple reasons. Not only can they generate food for a crew at a faster rate in comparison to fruits and vegetables, but they can also decompose matter and generate a compost/fertilizer blend to add to your greenhouse soil.
Judith Marcos (ENGR)
I have conducted a variety of tests in order to find failure in the design of the prototype Anchor Pleiades. This knowledge will allow my team to improve the design and repeat the engineering design process.
First, I collected a variety of 20 rock samples collected from Hab Ridge and the Intersection of Cow Dung Rd and Brahe Hwy on MDRS. The samples were cataloged by its variety in shape, texture and mass for a carry capacity test. While conducting the test it was found that Pleiades was limited by the size of the sample. This prototype is limited to a size range for sample collecting as well as depending on the angle it was collected from.
Then, after being taken in similar geographical terrain such as Mars, three different failures were identified. While in a sim and using a flight suit, helmet and gloves one becomes limited in vision, movement and loses the easy fluidness of movement. Outside of the Hab, it was identified that the prototype was harder to manage than first anticipated. A variety of small details on the prototype were too small to be fixed with gloves on if needed, as well as it was difficult to hold and certain aspects are too fragile to be managed in an external terrain.
As well as being outside, I was able to achieve visual confirmation that the prototype could be affected by external debris as suspected. Being affected by the debris means that over time there will be a loss in function of mobility, usefulness and wear and tear of the material used.
Finally for the prototype, many individual design factors were identified that could definitely be improved. For example: The head of the prototype has no area to grip the anchor with ease, the handle used to lower and lift is too fragile and thin for external use, the bolts used to re/disassemble are too small for use with gloves, the main rod frame is too long depending on the sample being extracted.
Izabela Shopova (COMM)
I was successful in developing a simplified, error proof process for daily yogurt making at MDRS, using lactobacillus bulgaricus (chosen for its benefits for the digestive and immune systems). We had freshly made yogurt daily, served to the crew in a variety of food recipes. I used the powdered milk and kitchen utensils already available at MDRS, which demonstrates the feasibility of making the homemade yogurt part of the analog astronauts’ diet. I also demonstrated to the crew the simplicity of the process and we had a discussion on the health benefits of yogurt consumption. In addition I grew broccoli and radishes sprouts and we harvested them in week two of the mission. They added fiber, vitamins and sulforaphane to the analog astronauts’ diet. The crew filled questionnaires, evaluating the quality of the yogurt, its ease of preparation and suitability for analog astronauts missions, which will add to the great body of data that is already available in the research of gut health and health benefits of lactobacteria.
During the mission I gathered enough knowledge and information about campus operations, EVAs and life at MDRS, which will be included in the pre-mission and mission orientation training modules for analog astronauts, to be completed, tested and presented to Mars Society for approval in the next two months.
I completed a video response to the more than 30 questions from school children from the Bulgarian Space Academy. They were all about Mars, space exploration, mars colonisation and the analog astronauts life and work. It will be presented to the Space Academy next week together with a tutorial on planet Mars and the latest development in Mars exploration.
Throughout the mission I maintained a personal diary, capturing my personal experience and shared thoughts of my crew, to be included in the book I am working on, that will highlight the importance of the analog habitats and simulations for the space exploration and future human colonization of Mars and the Moon.




















You must be logged in to post a comment.