[title End-Mission Research Report – January 3rd]
[category science-report]
Mars Desert Research Station
End-Mission Research Report
Crew 306 – Montes
Dec 22nd, 2024 – Jan 4th, 2024
Crew Members:
Commander: Jesus Meza-Galvan
XO and Crew Engineer: Keegan Chavez
Crew Geologist: Elizabeth Howard
Health and Safety Officer: Ryan Villarreal
Green Hab Officer: Adriana Sanchez
Crew Journalist: Rodrigo Schmitt
Summary:
Crew 306, “Montes” performed seven separate projects that covered a range of topics. Three of our projects required EVA activities. The other four projects were performed within the HAB, Science Dome, and RAM. Each crew member was responsible for proposing, planning, and executing their own project, highlighting the diverse expertise of the crew. The team utilized the analogue environment surrounding the station to perform a variety of experiments related to the long-term survival of a manned Mars station. We addressed the need for mapping and scouting terrain using a drone-based Li-DAR system. We addressed the need for sustainable waste management using fungi to break down and upcycle resources that would otherwise be lost. We addressed the need for crew and station health monitoring by implementing both wearable health monitors, and environmental sensors placed throughout the station. We addressed the need for in-situ resource utilization by collecting semiconductive materials from the environment and attempting to make photo-voltaic cells. And finally, we performed geological research by measuring the subsurface magnetic properties of the surrounding environment.
Research Projects:
Title: LIDAR-Enhanced Drone Simulations for Mars EDL Operations
Author: Rodrigo Schmitt
Objective: To demonstrate the feasibility and effectiveness of drone-based LIDAR operations for local terrain mapping, with a specific focus on improving the planning and safety of Entry, Descent, and Landing (EDL) procedures in Mars-like environments.
Description, activities, and results:
Traditional Martian Entry, Descent, and Landing (EDL) protocols rely on aerial or orbital observations, which can offer only limited resolution for landing site analysis. This project explores a novel approach: using a drone equipped with a LIDAR scanner, along with GPS and IMU sensors, to create accurate terrain maps. The ultimate vision for these maps is to demonstrate a way to replicate the final stages of EDL on Mars by identifying potential hazards, evaluating surface conditions, and pinpointing safe landing zones.
During the mission, the drone’s hardware and software were iteratively refined across several EVAs. In the first EVAs, basic hardware integration was tested near the HAB and at Kissing Camel. The LIDAR system—attached via a custom 3D-printed mount on the drone—revealed minor mechanical instabilities and electromagnetic noise. These issues prompted a backup mount design with more secure attachment points and improved cable shielding to ensure a more secure fit. Additionally, a Raspberry Pi provided both power distribution and data acquisition, aided by integrated scripts for automated data logging.
Subsequent EVAs to Skyline Rim, Eos Chasma, Barranca Butte and White Rock Canyon validated an enhanced version of the system, which now included synchronized readings using SSH remote protocol developed here at MDRS. Moreover, improved readings from the onboard IMU and GPS module were obtained through enhanced scripts, which can ultimately allow for more robust 3D mapping. Altitude, gyroscopic, and position data can now be fused to produce an accurate representation of the terrain. Each EVA resulted in raw LIDAR point clouds combined with gyroscopic data from the IMU and global coordinates from the GPS. Figure 1 (below) shows a picture of the integrated system during an EVA, showing the drone, LIDAR sensor, Raspberry Pi, and battery arrangement.

Figure 1: (a) Drone assembly with LIDAR sensor and mount; (b) Drone full assembly during an EVA with battery and onboard computing via Raspberry Pi.
In the final stages, the project evolved from simple LIDAR range scans to the generation of more cohesive terrain maps. Scripts developed on the Raspberry Pi (in combination with the mobile hotspot approach) enabled minimal user interaction, storing data for post-processing. Despite some altitude readings occasionally returning zero or noisy values, the integrated approach stabilized once the IMU and GPS timestamps were properly synchronized. A flight data recorder—written in Python—captured the LIDAR, IMU, and GPS topics. Preliminary results indicate that consistent data streams, coupled with robust timestamps, can ultimately enable transformations from a dense point cloud illustrated by Figure 2 into a ground-referenced map of MDRS-like terrain.
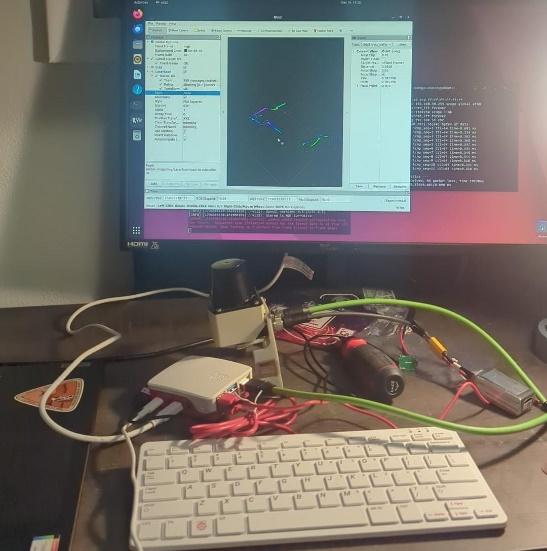
Figure 2: Point-cloud mapping of the LIDAR scan using the Raspberry Pi onboard computer
EVAs Completed: One to Kissing Camel, one outside the HAB, one to Skyline Rim, one to Eos Chasma, and two to Barranca Butte and White Rock Canyon.
Final Status: While final post-processing was deferred until after the mission due to limited bandwidth and time for large-scale data handling, the partial analysis suggests that the drone-based approach can be used to detect geological features and potential obstacles—an essential requirement for realistic EDL simulations. These experiences highlight that even in an Earth-based analog environment, in-flight mechanical vibrations, electromagnetic interference, and limited line-of-sight can affect data quality, underscoring the complexity of real-world Mars operations. In conclusion, the successful demonstration of LIDAR, IMU, and GPS synergy on a drone platform opens new possibilities for high-fidelity EDL site analysis. Future work will include advanced data fusion techniques and extended flight tests, paving the way toward autonomous drone scouts that provide real-time, detailed, and high-resolution terrain insights crucial for planetary exploration missions.
Title: Subsurface Magnetic Proper ties of the Martian Environment
Author: Elizabeth Howard
Objectives: Study geological magnetism to develop test procedures for future missions.
Description, activities, and results: Before going on EVAs, the EMF meter was put to the correct settings for logging data in the field; by the end of the mission, approximately 50% of the instrument’s internal flash was full. Once mission EVAs had all been completed, the data from the meter was downloaded into an Excel file and plotted in MATLAB. The EMF meter used during EVAs took recordings at a rate of 1/sec and logged EMF (mG), EF (V/m), and RF (mW/m2) at each recording.

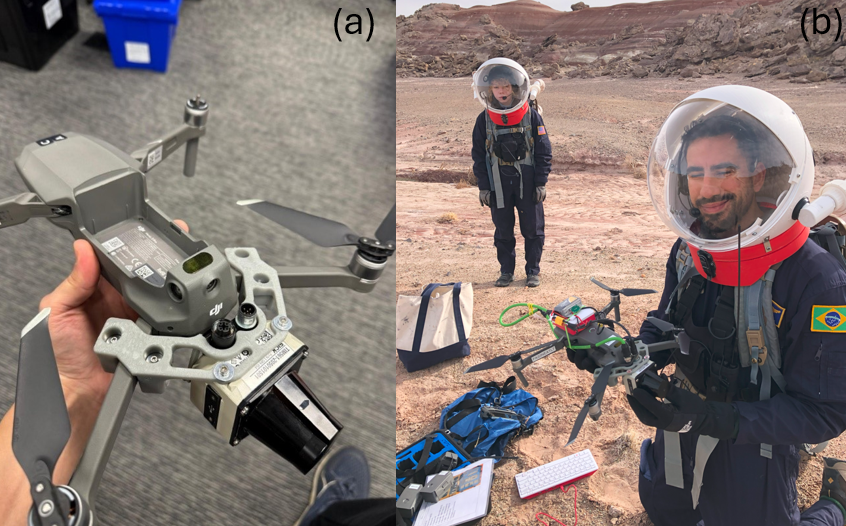
Figure 3: Crew Geologist Elizabeth Howard and Crew GreenHab Officer Adriana Sanchez setting up the EMF meter and taking a soil sample
Each of these quantities was graphed against time duration for each EVA where data was collected, which will be post-processed against date/time, solar environment data, and possible extraneous sources of EMF detected by the meter, which is also logged at each recording. By analyzing these results against solar activity data, operating procedures for astronauts to track planetary magnetic activity and possible correlation with the space environment can be developed.
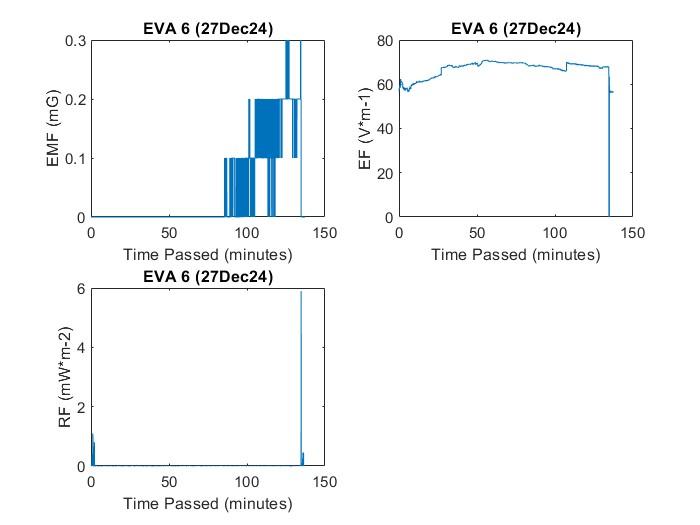
Figure 4: EMF meter data from EVA 6, with the highest f10.7 index of 258.5 relative to EVAs where magnetic data was taken
The analog mission environment in which this data was collected and initially processed is especially helpful for anticipating what a similar process would look like on a Martian base. Post-processing will ideally give insight as to how much infrastructure needs to be in place (via weather satellites, etc.) to make a sufficient correlation between magnetic data and solar activity data, which is useful to test in an analog setting knowing Earth has such infrastructure in place to do so. Overall solar activity has, thus far, been tracked using the f10.7 index, and as part of post-processing the Celestrak database will be checked for individual space weather satellites to take readings from. Taking individual satellite data would likely be more similar to the infrastructure that would be available during the early stages of a Martian base than the f10.7 index, but if individual satellite data searches are not able to provide sufficient insight to the space environment, this will be a limitation that a Martian base would have to overcome. One objective of this project being to gauge the challenges of studying the Martian magnetosphere from a Mars base and developing ways to overcome those challenges has offered several areas such as this for problem solving. Interest in developing ways to anticipate and model the Martian magnetosphere and possible influencing factors stems from the magnetic field’s relevance in aspects of long-term human habitability such as radiation shielding.
EVAs Completed: One to Kissing Camel, one to HAB Ridge, one to Skyline Rim, one to Eos Chasma, and two to Barranca Butte
Final Status: A satisfactory number of EVAs were completed using the EMF meter for data collection; this data has been plotted and is able to undergo post-processing. This will involve analysing trends in data such as short-term (on the order of minutes) changes in readings as well as overall daily value ranges. Soil types where the instrument was placed were collected and qualitatively logged to consider this as a factor in day-to-day data trends.
Title: Waste Management Solutions for Space Habitats: Utilizing Mycoremediation
Author(s): Adriana Sanchez
Objectives: Advancing the TRL of Mycoponics™ technology by accessing transportability, and survivability of blue oyster fungi (Pleurotus ostreatus var. columbinus).
Description, activities, and results: For the first half of the mission, I focused on feeding the mushrooms and minimizing contamination. Before flying out to Grand Junction, no contamination was observed. The morning after arriving in Grand Junction I observed contamination on 4 of the 7 tubes. Tubes 1-3 were fed a complete standard media and tubes 4-8 were being fed a plastic digested media with different concentrations ranging from 100%, 125%, 150% and 200%. A higher surface temperature was observed in the evening than in the morning but by no more than 10 degrees. Every two days exudates have been collected for testing upon return to Purdue University. On Sol 1 and Sol 5 we performed contamination control by spraying a diluted solution of hydrogen peroxide onto contaminated spots. Mycelium had been observed growing over the contaminated spots which has not been observed in the past. A CO2 flux collection chamber has been made from two peanut containers and two Aranet environmental sensors, with one designated for measurement of the CO2 in and CO2 out. This will be used to observe the rate of respiration of the Mycoponics™ tube. For the last two days of the mission, we recorded time lapse videos of growth throughout the day. This will be used to observe how the mushrooms moved and grew throughout the day. Each day, measurements of how much liquid media run off were collected. However, data is sporadic and cannot be linked to any one variable.
EVAs Completed: No EVA’s were required for this project.
Final Status: Despite contamination and environmental challenges, the blue oysters demonstrated notable resilience by growing over contamination and surviving elevated CO2 levels, low temperatures, and variable nutrient concentrations. At MDRS, a new procedure to eliminate contamination was tested and shown to be successful. By using direct application of a dilute solution of hydrogen peroxide, contamination is destroyed, and mycelium can recolonize contaminated portions of the tube. The tubes and chambers exceeded expectations. At Purdue, testing of the liquid media run off will be conducted to determine the recyclability of waste media and nutrient absorption of the blue oyster fungi. These chambers were not as optimal as they could have been for data collection due to their inability to control the ambient conditions. This could pose potential issues for mycelial harvest and growing in more extreme conditions in the future. Refilling feeding syringes had to be done under the hood to reduce risk of contamination. Collecting the runoff media was another daunting task that could introduced unwanted contamination if not done properly. On Earth and in microgravity, stagnant liquid is a breeding ground for bacteria. Proper drainage of mycelial excaudate will ensure the success of healthy mycelial growth. Having hard mounted CO2 Flux chambers mounted to the sides of mushroom tubes make the system difficult to maneuver and observe. A potential solution is to use a valve that allows for the easy removal of the tubes from air inlets. The surface of living mycelial mass has been observed to be extremely sensitive to temperature changes. Material of Mycoponics™ chambers will need to be temperature resistant to ensure optimal mycelial growth. The design for nutrient delivery, design of CO2 and sensor chambers, and investigating methods to stabilize liquid drainage in microgravity conditions will be reevaluated to further progress the technology readiness level of Mycoponics™. After the next design phase this technology will be ready for demonstration in a space environment.
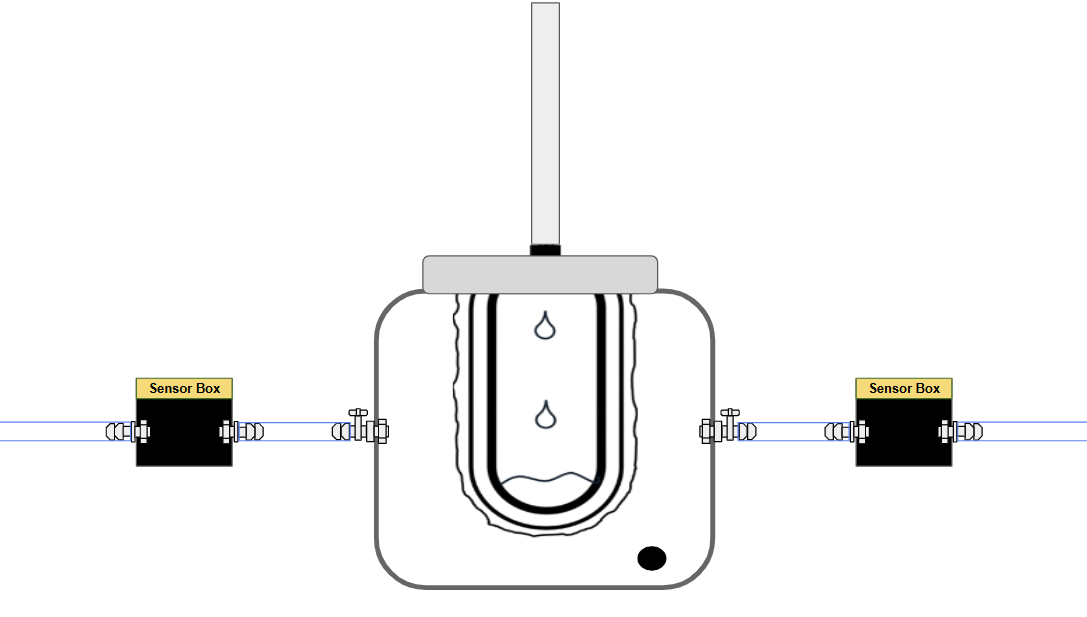
Figure 5: Potential Mycoponics™ design.
Title: Fabrication of photovoltaic cells using semiconductor material gathered In-Situ.
Author(s): Jesus Meza-Galvan
Objectives: Gather iron fillings and iron-oxide containing minerals from the environment to use as semiconducting material to fabricate a rudimentary dye-sensitized solar cell.
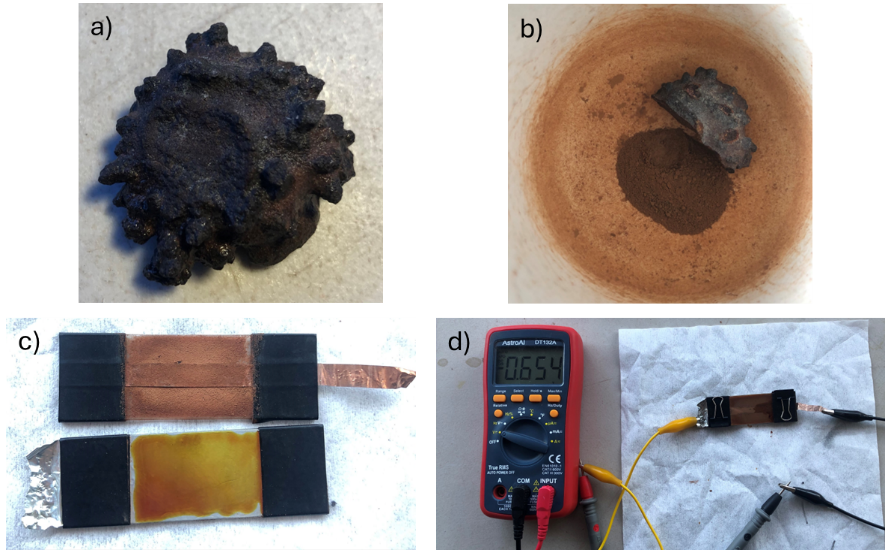
Description, activities, and results: The first half of the mission for the project was focused on gathering materials from the environment surrounding the HAB. The target of our search is raw iron in the form of fillings gathered from the soil, and iron-oxide minerals in the form of hematite. Iron filings were extracted from soil samples collected during EVA using a bar magnet as shown in Figure 6. The soil samples collected were first dried in one of the ovens in the science dome at 125°C for at least 1 hour, once cooled, the soil was placed in beaker with a bar magnet and sifted. The magnetic minerals stuck to the surface of the magnet were thus separated from the soil. Figure 6d shows a summary of the soil samples collected, their total weight, and the weight of the iron extracted. Most samples showed only minute traces of Iron, having less than 0.01% iron content by weight. The sample with the highest iron content, EOS 03, was collected from the end of Eos Chasma where it meets the Muddy River. Altogether, only 0.2 grams of magnetic minerals were collected from 9665 grams of soil. This was not enough to perform the controlled oxidation experiments to create semiconducting FeO that were planned for the mission. However, there seems to be enough free iron in the environment such that a more efficient collection method could yield enough material for the experiment in the future.
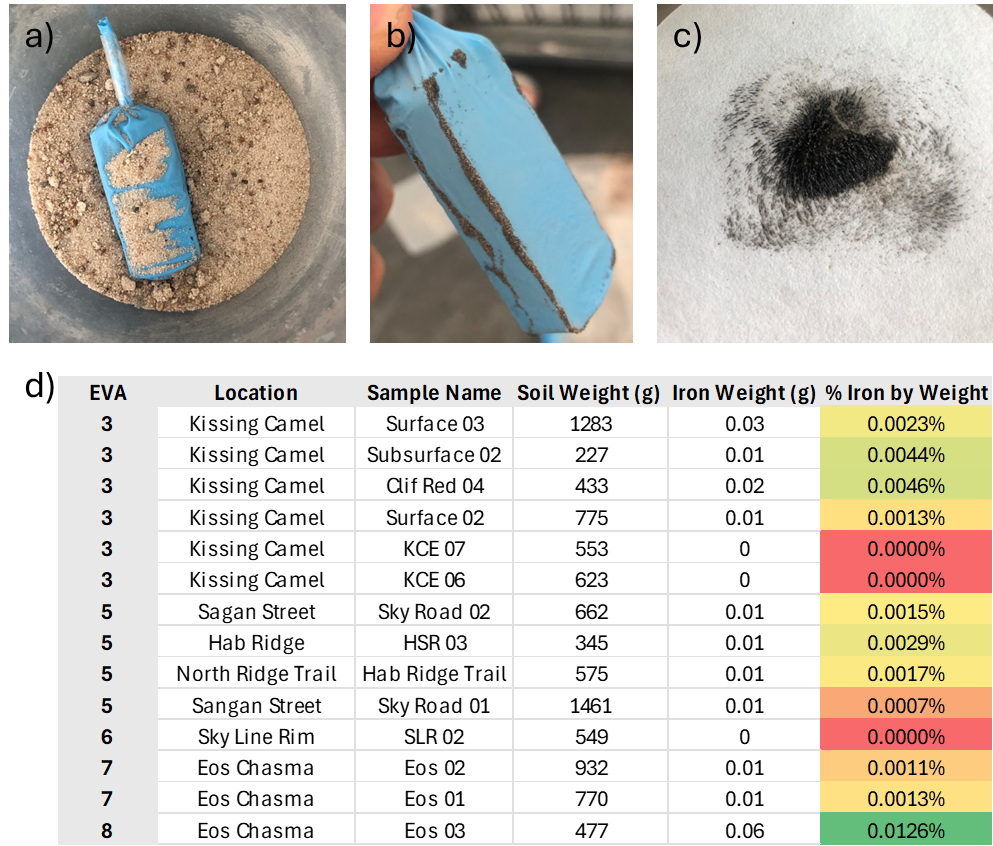
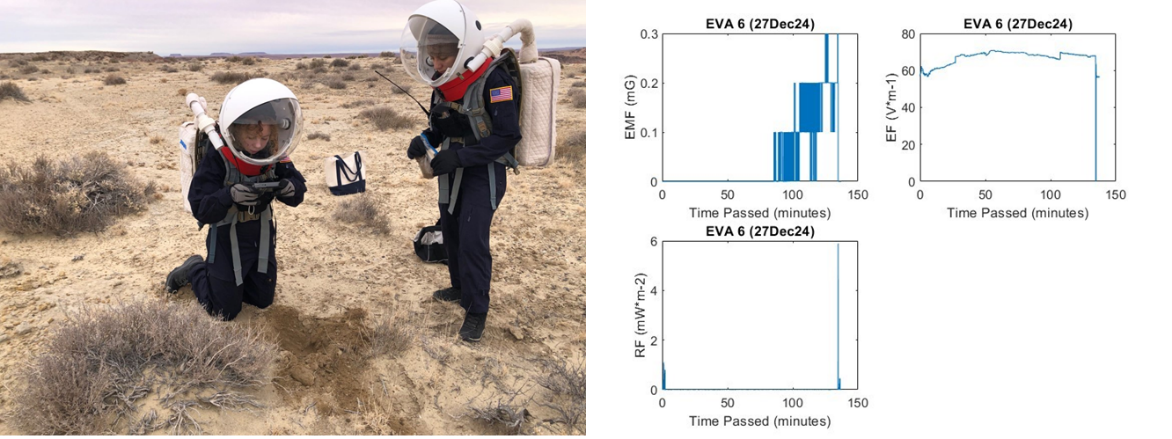
Figure 6: Iron extraction from soil samples collected during EVAs. a) A bar magnet is enclosed within latex and placed inside a beaker along with dry soil samples. The soil is sifted around with the magnet. b) iron and other magnetic minerals stick to the magnet and are separated from the soil. c) Aggregate magnetic material collected from all EVA sites, aligning to the magnetic field of a magnet underneath the white paper. d) Table of all soil samples collected, the dry soil weight, and the weight of iron extracted.
Hematite concretion samples though to be composed primarily of Fe2O3 were found atop of HAB ridge. These samples were ground down into a fine powder to make a semiconducting layer for a ferroelectric solar cell as shown in Figure 7. The devices made using this material produced between 0.2 Volts and 0.7 Volts. However, the devices did not seem to not be photo-sensitive, as the voltage produced remained constant in both light and dark conditions. This indicates the devices made were not solar-cells, but instead some sort of chemical battery, perhaps driven by a reaction between the hematite powder, the iodide solution, or the copper electrode. All devices made had lifetimes no longer than 5 minutes, as the hematite layer quickly dissolves into the iodide solution. To improve the devices, a binder must be added to the hematite powder to maintain the layer integrity against the liquid redux mediator.
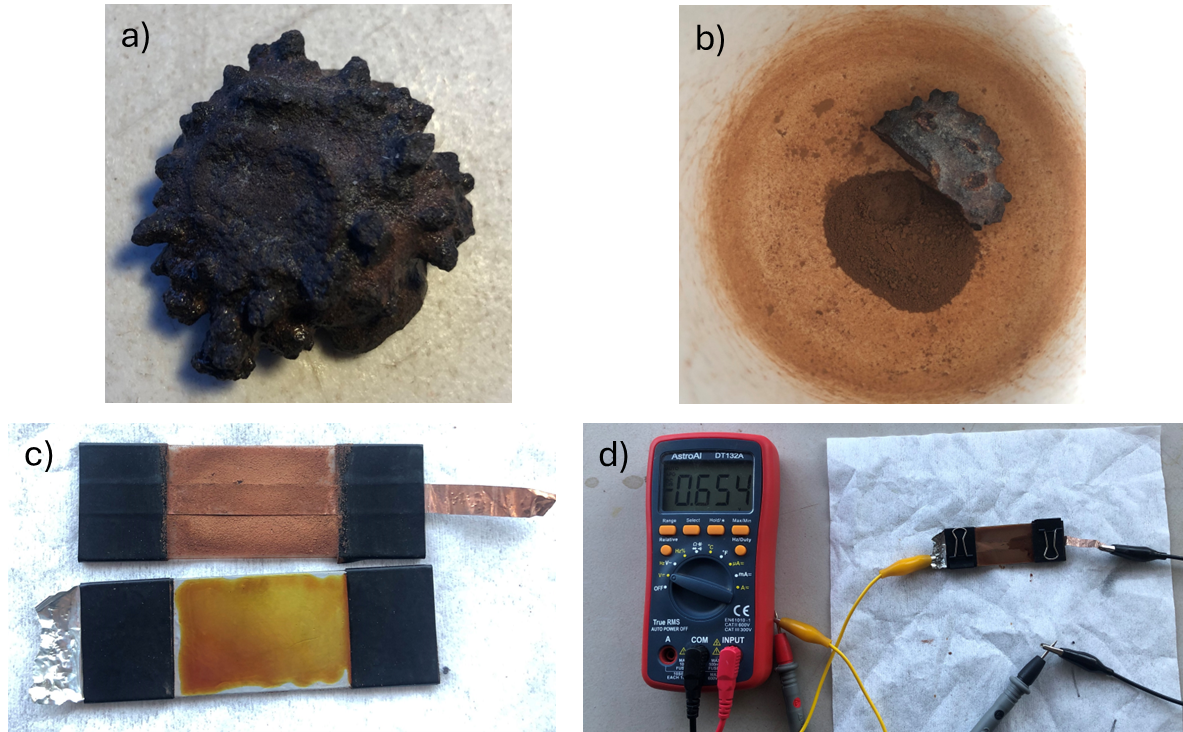
Figure 7: a) Hematite Concretion collected from HAB ridge. b) Ground hematite powder believed to be composed of primarily Fe2O3, a semiconducting material that can be used for photo-sensitive cels. c) Top electrode of a photosensitive cell using hematite powder as the active layer and a copper strip for electrical contact, and bottom electrode using aluminium as the electrical contact and over the counter iodide tincture (a first aid antiseptic) as a redux mediator. d) Full device connected to a volt meter showing the cell produced 0.654 V of electricity.
EVAs Completed: One to Kissing Camel, one to HAB Ridge, one to Skyline Ridge, and one to Eos Chasma.
Final Status: The objectives of this study were met. However, the performance of the electrical devices made could be vastly improved. Samples of hematite collected from HAB ridge will be taken back to the lab for analysis and further refinement of devices.
Title: Sensor-based Team Performance Monitoring in Isolated, Confined, and Extreme Environments
Author(s): Ryan Villarreal
Objectives: To take team-level measurements of team dynamics in isolated, confined, and extreme environments.
Description, activities, and results: Teams are complex, interdependent, groups of individuals that require cohesion to perform effectively. In safety critical contexts, a breakdown in teamwork and efficacy can have devastating effects. One such context is isolated, confined, and extreme (ICE) environments such as long-haul space flight or a Martian habitation. These ICE contexts provide unique challenges for teams marked by inferior task performance, increased stress, and diminished mood. Current measurements of team dynamics rely on self-reported questionnaires, simple task performance, or expert evaluation. These methods are inherently subjective, suffer from rater bias, focus on individual-level metrics, or don’t capture social interdependencies foundational to teams. Objective measurement of team dynamics through the use of non-obtrusive physiological measurement has been proposed at the individual level, but abstracting these results to the team-level is non-trivial. One such method for quantifying these measures at the team level is through analyzing the physiological synchrony among team members. There are presently no studies on team-level physiological measurement and team physiological synchrony of teams operating in ICE contexts. While at MDRS, the crew wore Corsano CardioWatch 287-2’s to record an assortment of physiological metrics including heart rate, movement, and blood pressure. The crew also completed daily team cohesion and efficacy questionnaires to act as a baseline for team dynamics over the course of the mission. This questionnaire measured the crew members’ perceptions of team effectiveness throughout the mission, and how they vary resulting from performing critical tasks. This survey was filled out at the end of each day, before and after each EVA, and before and after the given puzzle task. The puzzle task was a “Super Tangram” which involved taking 14 unique geometric shapes and attempting to fill in a template using these shapes (Figure 8). In this task, the crew had to work together synchronously to solve each puzzle. This puzzle task was completed three times throughout the mission, on Sol 1, Sol 6, and Sol 12, while physiological data was collected continuously. With all data now collected, analysis will be completed through Multidimensional Recurrence Quantification Analysis (MdRQA) to generate team-level results for understanding physiological synchrony of the crew throughout the mission. Due to the extremely large file sizes of the physiological data collected, analysis will not begin until returning to Purdue. Analysis of the subjective questionnaire results will be used to determine how the crew’s perceptions of their efficacy and cohesion relate to the physiological measures. This will further allow for understanding how the crew’s cohesion and efficacy changed throughout the mission, giving the potential to explore how physiological synchrony develops alongside the crew’s team dynamics.

Figure 8: Crew 306 performs one of the puzzle tasks, where they must take 14 unique geometric puzzle pieces to fill in an outline. This task showed to be deceptively difficult, with pieces only fitting together in specific orientations.
EVAs Completed: No EVA’s were required for this project.
Final Status: All data was successfully collected for analysing team-level physiological response to isolated, confined, and extreme environments. Analysis will begin upon returning to Purdue, where greater computational resources are available.
Title: EVA Crew Monitoring System
Author(s): Keegan Chavez
Objectives: The project will extend the MDRS Monitoring System project to include a network of Raspberry Pi’s to measure and record crew member biometrics while on an EVA, specifically body temperature and CO2 levels.
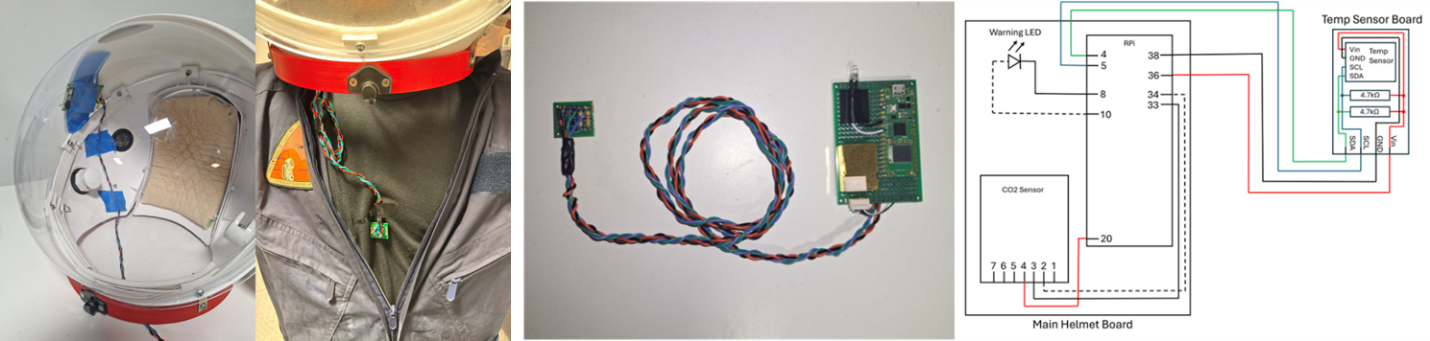
Description, activities, and results: It was determined that the new Smart Home Monitoring system installed in the Lower Hab accomplished the research goals set by the MDRS Monitoring System project developed by crews 288, 289, and 305. Therefore, a new project had to be developed that would make use of the sensors, Raspberry Pi, and code that were originally going to be used for the MDRS monitoring project. The EVA Crew Monitoring System will attempt to track important biometric data from crew members out on EVA using sensors placed inside their flight suits and EVA helmets. The only available sensors that can record valuable data are the CO2 and temperature sensors. The CO2 sensor, Raspberry Pi, and a warning LED were soldered to a single board and this board was placed in the helmet so the CO2 sensor can monitor the amount of CO2 in the environment directly around the head of the wearer. This allows it to act as an oxygen level sensor, where the warning LED will illuminate if the wearer is overexerting themselves making the level of CO2 in the environment higher than the level of oxygen. The temperature sensor is soldered to a separate board that is connected to the main board by a series of wires. This board will be placed somewhere on the torso of the wearer to track their core temperature. The data from both sensors will be saved on the Pi and uploaded to the Purdue Dashboard during comms using code that was developed by crew 288 and 289.
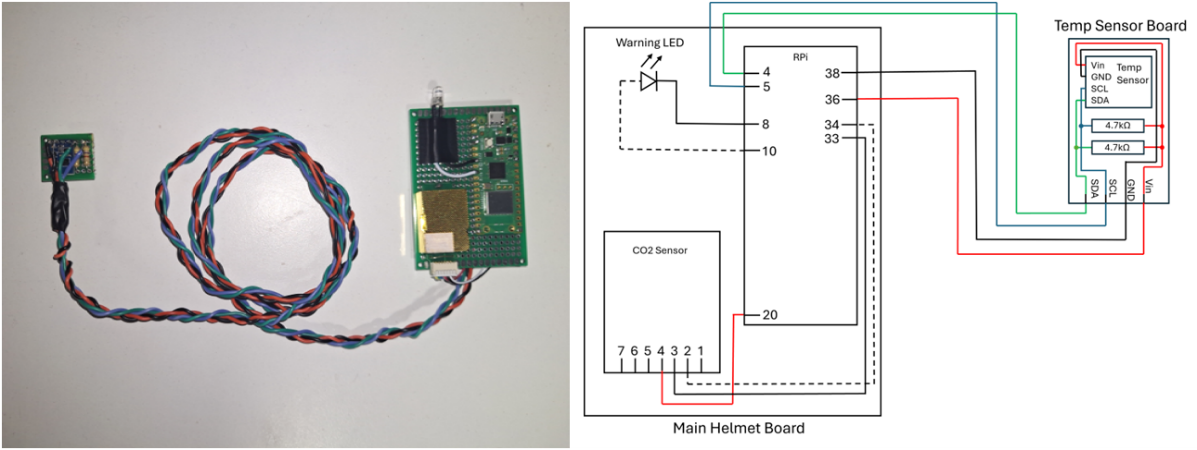
Figure 9: Completed EVA Crew CO2 and Temperature monitoring system and wiring schematic
Without an approved IRB we were unable to test the system with a crew member on EVA, acquiring this IRB and gathering data in the field is the next step. To accomplish that a more robust method of fixing the CO2 and Raspberry Pi board to the inside of the helmet must be determined. During Hab testing the board was taped down with painters’ tape, but this will be insufficient to hold the board and wires in place throughout a full EVA. Before use, the CO2 sensor needs to be calibrated for CO2 levels without a user present and with a user present under normal conditions. There is currently only one warning LED that will illuminate once either sensor records a value over a programmed threshold, increasing the number of LEDs to indicated different levels of concern will increase the usefulness of the information captured by the monitoring system during EVA.

Figure 10: Placement of the CO2 Sensor (left) and Temperature Sensor (right)
EVAs Completed: No EVAs were completed with monitoring system
Final Status: One hardware prototype was developed, calibration of sensors is needed, IRB for testing on EVA is needed, development of method for fixating main helmet board during EVA is needed
7.
Title: Wearable-Based Autonomic Profiles for Real-Time Cognitive Monitoring in Spaceflight
Author: Peter Zoss, Ryan Villarreal
Objective: This study will longitudinally quantify individual changes in autonomic nervous system (ANS) status via a wearable sensor in MDRS crew members to understand how our autonomic activity is associated with sequential measures of cognitive performance for predictive model development.
Description, activities, and results: Astronauts on long-haul space flight or Martian habitats will experience significant cognitive workload demands in their daily life that exceeds normal demands. In these contexts, this significant demand can lead to critical errors with life-threatening effects. Therefore, finding ways to model cognitive workload and performance is crucial for planning daily routines and monitoring the wellbeing and readiness of astronaut crews. This project used wrist-worn physiological sensing devices to monitor crew members throughout the mission, and during administration of cognitive tests to track cognitive performance over the mission. Data collection sessions for the cognition test involved participants wearing a VR headset for eye tracking recordings while performing the Cognition Battery Test on a tablet. All data collection for this project was successfully completed, with cognitive tasks being performed by crew members on Sol 2, 4, 5, 7, 9, and 11. Analysis on the physiological data will be completed upon return to Purdue due to the large amount of computing power required to analyze the vast amounts of data. This analysis will allow for determining how autonomic nervous system changes occur in spaceflight scenarios, and building predictive models for determining when crew members cognitive workload may be too high for performing critical tasks. This can then be used as a monitoring and recommendation system for maintaining cognitive health and the overall health and safety of the crew.
EVAs Completed: No EVA’s were required for this project.
Final Status: All data was successfully collected and will be analysed once back at Purdue where more computing resources are available.









You must be logged in to post a comment.