

[category science-report]

MID-MISSION REPORT
Mars Desert Research Station Crew 286
Sunday November 12 to Saturday November 25, 2023
Report Date: 19-Nov-2023 – Sol: 07
Roger Gilbertson Commander
Donald Jacques Executive Officer, Crew Engineer
Liz Cole Health & Safety Officer, Crew Journalist
Guillaume Gégo Crew Scientist
Scott Beibin Crew Astronomer, Artist In Residence
Hugo Saugier Documentary Filmmaker
INTRODUCTION
The six person crew of MDRS 286 came from individual applicants and invited people. We represent a range of cultures, talents, experiences, backgrounds, and varied interests.
Since our arrival we have received habitat orientation, EVA training, conducted extended training for radio communications, and have performed six EVAs to date.
We have started our broad range of science, technology, and art projects including:
• Bacterial growth experiment helpful for creating closed-loop life support systems
• Planning for an extended range EVA using the MASH (Mobile Analog Space Habitat) vehicle
• Technology demonstrations collecting and studying some in situ resources
• LiDAR scanning of local geological features
• Extensive videography of all aspects of habitat and EVA operations
• Daily media updates
• Daily monitoring of the environmental and life systems aboard the MASH
In general, we have proceeded efficiently and effectively. However rain began on Sol 6, cutting short our EVA #6, and introducing uncertainty for the timing of future planned exterior activities.
VISITING MEDIA
Additionally, we are currently hosting two visiting photographers sent by the New York Times, Andrea Orejarena and Caleb Stein. They arrived the morning of Sol 4, and have remained fully “in sim” with us for their entire stay. They successfully adapted to many challenges of using their professional camera equipment while constrained by space suits while on EVA. They plan to depart tomorrow, the morning of Sol 8.

Visiting photographers Caleb and Andrea on EVA at Marble Ritual.
PROJECT 1: CO2 Fixation by Purple Bacteria for Space Food Production: A Comparison of Three Electron Sources & Terrestrial Applications.
Lead: Guillaume Gégo
Background: Master degree in Biochemistry, Molecular and Cellular Biology at UMONS, BE.
Process: The CO2PROT project aims to develop an efficient, sustainable and reliable Bacteriological Life Support System for manned space exploration using purple bacteria. Purple bacteria are known for their metabolic heterogeneity, which allows for different compounds, like wastes or in situ resources, to be envisaged as substrates.
Among these, carbon dioxide remediation is by far the most attractive option, as it traps waste into potentially edible biomass. With the carbon source defined, multiple electron sources are available, but no comparative data has ever been accumulated to rule out the better option, would it be for space exploration or terrestrial applications.
In this study, three main metabolisms leading to CO2 fixation will be compared by studying the growth of purple bacteria model Rhodospirillum rubrum in:
• Photoheterotrophy: High-electron-content volatile fatty acids (Butyrate/Valerate).
• Photoautohydrogenotrophy: Hydrogen.
• Photoautoelectrotrophy: Electron flux (current).
The bacteria will be grown inside low-cost bag photobioreactors to assess the possibility of mass-production in altered gravity, while reducing costs of terrestrial downfalls of the study. Analog missions are therefore ideal platforms to test if such installations are feasible on other planets. Since photoheterotrophy was already studied in another analog (AATC, Poland), photoautohydrogenotrophy will be tested at MDRS as a follow-up.
SETUP

Left: Cultivation chamber & electrolyser. Five bag bioreactors were inoculated with purple bacterium Rhodopseudomonas palustris TIE-1. The carbon source used is baking soda, and the electron source is hydrogen produced via electrolysis. The bags are constantly agitated by a rocking platform, which helps solubilize the gas phase within the freshwater media. Green (525nm), Orange (592nm) and infrared (850nm) LED strips are used to supply photons to the anoxygenic photosynthesis pigments.
Right: Hydrogen electrolysis system.
METHODS
In the science dome, the five bags inoculated with purple bacteria Rhodopseudomonas palustris TIE-1 are growing well. Turbidity (measurable optical density), measured using spectrophotometry, increased in all photobioreactors, on average from 0.12 to 0.25, an approximate doubling in 12 hours. One sample is taken each 24h for each bag, centrifugated, and the supernatant is separated from the pelleted bacteria, then stored at -20°C. H2 is supplied ad libitum daily, since the expected consumption of H2 cannot be estimated easily.
Another shipment from the University of St. Louis of Rhodospirillum rubrum SH1 inocula arrived on Sol 4. Looking ahead to the week’s progress with the experiment, the plan is for the Rhodospirillum rubrum SH1 to be inoculated in five photobioreactor bags and fed freshly generated hydrogen.
RESULTS

Tables 1 & 2: Sampling schedule and spectrophotometry measurement results (OD).

Figure 2: OD measurements between SOL 3 and 5. Growth is visible and follows known trends. Similar experiments will be performed at the University of Mons to confirm these results.
– # –
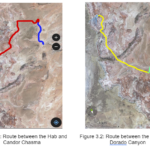
PROJECT 2: Performing Extended Extra-Vehicular Activities Using a Mobile Analog Space Habitat
Lead: Donald Jacques
Background: EVA’s at MDRS are constrained by the range of the rovers, time necessary to recharge the batteries, as well as the physical strain on participating crew members, exposed to the elements during travel, much less being able to replenish food, air, water during an extended EVA.
Update: We have defined the logistics of preparing the MASH for the excursion, and are developing the EVA Requests to execute during the second half of our mission. Seating for the EVA team members in the cockpit has been completed. A preparation EVA the day before will be necessary to retract the solar panels, for departure. Then on the day of departure, suits, radios, chargers, and personnel will board. The plan is to traverse to the destination, suit up, execute the first EVA, then return to the MASH for a sack lunch and suit/radio charging time; then execute a second EVA, followed by a return to the hab in the afternoon. This is of course dependent on weather conditions.

Command section of the Mobile Analog Space Habitat (MASH)
– # –
PROJECT 3: Creating High Resolution Interactive Digital Assets of MDRS and Local Geological Sites Using 3D Scanning techniques.
Lead: Scott Beibin
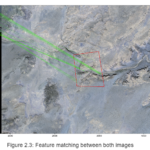
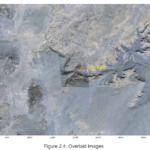
Background: LiDAR, Photogrammetry, Neural Radiance Fields (NeRFs) and other techniques can be used for accurately creating detailed high resolution digital twins that can be utilized for remote study of objects and landscapes. This can include examining equipment that has undergone stresses (rocket motors, fuel tanks, protective shielding) and looking at geological features. The advantage of having high resolution scans is that there can be coordination of examinations between explorers on Mars as well as remote support teams on Earth and elsewhere. Currently I have been using a variety of LiDAR devices for my own archaeological explorations.
Update: So far on the mission I have had three successful outings where I’ve used LiDAR to scan geological features. To do landscape LiDAR scanning of outdoor locations I’ve been a custom built jib consisting of a two meter long extendable pole fashioned from a modified monopod upon which is mounted are two pulleys. At the end of the far pulley I mount an iPhone 14 which is used for scanning. This enables me to have a greater reach where I am able to capture more details.
So far LiDAR scanning has happened in 3 locations on 3 separate EVAs:
• Sol 1 – EVA 1 Marble Ritual: Reconnaissance done using iPhone 14 for test scans – accompanied by 360 video.
• Sol 2 – EVA 3 – Mailbox Rock: Detailed scanning of a large area containing many interesting and colorful geological features and surface textures in the proximity of Zubrin’s Head.
• Sol 4 – EVA 4 – Clay Gathered on MDRS campus: Clay was gathered and geotagged near the Science Dome from a dry streambed. Samples will be prepared for 3D clay printing on the Mandelbot Ecotech SURFA2 Goostruder.
Various technical problems were identified and solutions will be implemented on future scans, including the use of a drone camera for improved scanning results.

Image 1. Marble Ritual features. Scan by Scott Beibin

Image 2: Mailbox Rock. Scan by Scott Beibin.

Image 3. Scan of stream bed near Science Dome. By Scott Beibin.

Image 4: MDRS 286 Crew Member Scott Beibin LiDAR scanning a stream bed. Photo by Liz Cole.
– # –
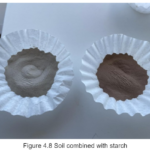
PROJECT 4: Producing Functional Artifacts Using Local Clay Resources and a 3D Extrusion Printer
Lead: Scott Beibin
Background: This project proposes collecting local clay and gypsum from the vicinity of MDRS and processing it into 3D printed objects intended for either durability or ecologically minded disposability. I have designed a 3D plotter/printer that will be used for this project (Mandelbot Ecotech SURFA2 Goostruder).
Update: Some equipment was damaged in transit and needed some soldering and structural repairs. All is working fine now. On Sol 4 EVA #4 we gathered and geotagged the locations of clay samples taken from stream beds around MDRS near the Science Dome.
Next I will begin to crumble the samples into a powder and separate the clay from the sand, then suspend the sifted material in water and wait for it to settle. Once settled, I will pour off the water and put the remaining material into a cloth bag. I will squeeze out all of the moisture to reveal the clay. I will experiment with various thicknesses of the clay then insert into 60ml syringes which I will insert into the Goostruder on the Mandelbot Ecotech SURFA2.

Geotagged soil samples
– # –
PROJECT 5: Using Local Gypsum Resources to Produce Molds for Metal Casting
Lead: Roger Gilbertson
Background: Residents of Mars will utilize local resources as much as possible. After fulfilling their original purposes, metal items brought from Earth can be melted and reformed into other useful items. The age-old techniques of mold making and metal casting will find new uses on Mars.
Update: The project originally proposed collecting local gypsum from the vicinity of MDRS, however since previous missions have located, collected and processed gypsum into plaster, in order to conserve EVA and lab time, I decided to use commercially prepared plaster instead of creating it here.
The “original” of the test component was 3D printed in PLA plastic, then pressed into a mold form containing thickening plaster. When dried, the original was removed, and the resulting plaster mold half cleaned and baked in a science dome oven at 250 °F for two hours. Next steps include: preparing the second half of the mold, then filling it with low-melting temperature non-toxic bismuth metal to make a component. If time allows, three identical pieces will be cast and assembled.

Left: Mold form with thickening plaster and PLA original. Right: Dried first mold half.
– # –
PROJECT 6: Mars Academy – A Documentary Film About ESA Scientist Claude Chipaux and the Past, Present and Future of Mars Life Sciences
Lead: Hugo Saugier
Background: When my grandfather Claude died in 2010, I discovered that he was the founder of a research program of the European Space Agency, dedicated to the question of the autonomy of the crews of long journeys in space. I then understood that the popular figure of the high-tech astronaut is gradually changing, being replaced by a new kind of galactic explorers: astronaut-farmers. For a while, I didn’t know what to do with such a heritage, until I recently decided to write a movie about Mars dreamers in which my grandfather would be one of the characters.
Update: I’ve been shooting great images of people in sim, doing their work and during their daily routine. One thing that specifically hit me up is how the group members have really different backgrounds but are complementary. In these conditions, I need to be particularly quick, organized and reactive as things go fast and people are always doing interesting things. Sound is not always easy to handle but recording walkie talkies sound is surprisingly easy and provides good results. My goal for the second part of the stay is to continue to collect as much footage as I need, which is pretty much a challenge regarding the time remaining.

Hugo filming and recording audio.

Sunrise viewed from the RAM.

Guillaume in the Science Dome.

Setting out on an EVA in a two-person electric rover.

Roger, Hugo and Guillaume rest and converse at Marble Ritual.
– # –
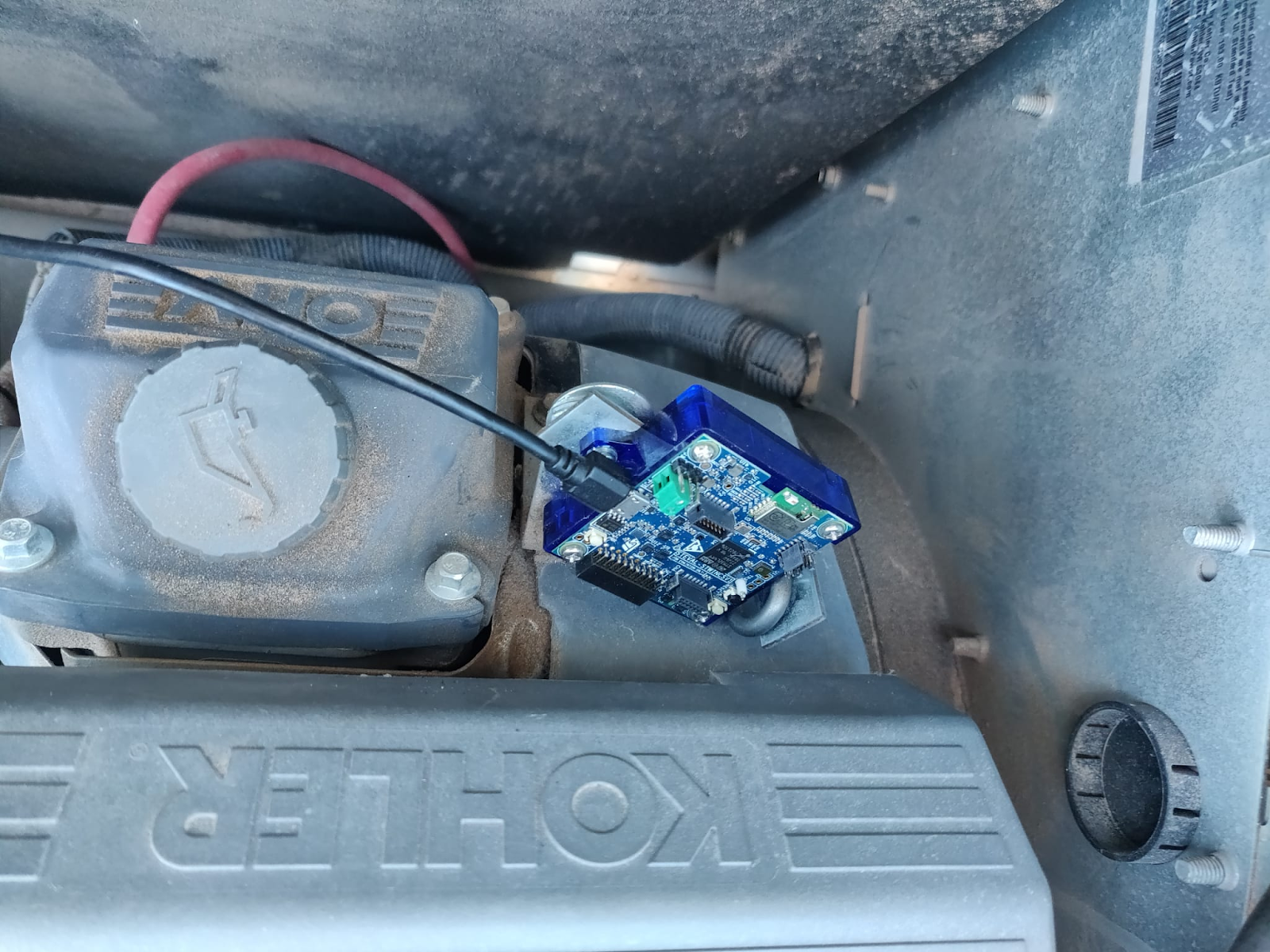
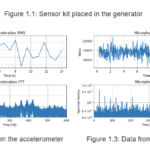
PROJECT 7: Simulating Acoustics of Mars for an Outdoor Martian Music Performance
Lead: Scott Beibin
Background: Using recordings from the electret microphone mounted on the Supercam on the Perseverance Rover a ground truth for the modeling of acoustic processes in the environment on Mars was characterized for the first time in the audible range and beyond (20 Hz to 50 kHz). SuperCam’s microphone recorded air pressure fluctuations from 20 Hz to 12.5 kHz or 50 kHz, at sampling rates of 25 kHz or 100 kHz. Recordings of the Ingenuity rotorcraft and laser-induced sparks were used as reference sources of sound.
It was discovered that:
• The acoustic impedance of the martian atmosphere results in approximately 20 dB weaker sounds on Mars than on Earth – if produced by the same source.
• The acoustic attenuation range on Mars was discovered to be roughly between 20Hz to 20kHz.
• Two different speeds of sound were observed on Mars. Low-pitched sounds travel at about 537 mph (240 meters per second), while higher-pitched sounds move at 559 mph (250 meters per second) because of the low-pressure 96 percent CO2-dominated atmosphere (compared to 0.04 percent CO2 on Earth).
• The atmospheric pressure on Mars is about 0.6 kPa (170 times lower than on Earth).
Process: Using the data that was published in Journal Nature [https://www.nature.com/articles/s41586-022-04679-0] and on the Nasa website [https://mars.nasa.gov/mars2020/participate/sounds] I collaborated with audio engineer John Knott to create a filter in a DAW (Digital Audio Workstation) that accurately simulates the way sound travels on Mars.
Update: All music, audio recording, video and other sensor gear has been assembled and tested for the Ptelepathetique musical performance. The reconnaissance EVA on Sol 6 to scout for a suitable location for the Ptelepathetique Martian Music performance located has been delayed due to dangerous conditions created by rain resulting in slippery mud around MDRS.
Because of this we will need to delay the outdoor performance which was to take place tonight (Sol7).
We plan a Ptelepathetique music performance in the science dome tonight demonstrating the simulation of sounds as would be heard in the atmosphere of Mars via the custom software filter that I created with audio engineer John Knott.
If conditions allow, we plan to do an early morning EVA tomorrow (Sol 8) for a “sunrise” music set.

Planning diagrams for the technical setup of all the gear necessary for the performance.
– # –
PROJECT 8: Documenting the MDRS Mission 286 Adventure in Words and Images
Lead: Liz Cole
Background: Life in the constraints of the Martian environment requires a shift to more sustainable life support systems such as vegan and plant based food production and building with local resources. Crew 286 of MDRS is developing various technologies to support life on Mars while addressing Earth’s most pressing environmental problems. Documenting the crew conducting their research, EVAs and life throughout the course of the mission will highlight the work of researchers at MDRS.
Update: So far I have produced posts for each Sol, giving a narrative of what happened on each Sol, documenting the progress of the crew’s experiments and projects thus far into the mission, and documenting the crew’s experiences conducting EVAs, learning comms protocols, developing resource conservation protocols inside the simulation, and other activities inside the simulation.
I have recorded interviews with Crew Scientist Guillaume Gégo who explained the progress of his experiment exploring CO2 fixation by purple bacteria for space food production, and recorded interviews with Crew Artist Scott Beibin on his progress creating high resolution interactive digital assets of the MDRS habitat and facilities and local geological sites using 3D scanning techniques, and simulating the acoustics of Mars for an outdoor Martian music performance. Many crew meetings, including the practice drills of EVA communications, have also been recorded.
UPCOMING
Looking ahead to the second half of the mission, I plan interviews with Crew Commander Roger Gilbertson, Crew Executive Officer and Engineer Donald Jacques and Crew Documentary Filmmaker Hugo Saugier. Follow up interviews with Guillaume and Scott on the progress of their experiments and projects will be done in the second half of the mission.
MEDIA AND OUTREACH
Interview with Mars Society Belgium, where they will host Crew Scientist Guillaume Gégo, for a live conversation on the Mars Society Belgium Facebook page on Thursday November 23rd at 9am MST.
Interview with Journal des Enfants (https://www.jde.fr/) and Crew Scientist Guillaume Gégo on Monday November 20th at 9am MST. This is a publication for kids aged 8 to 12, so this interview seeks to inspire young people to dream of becoming astronauts and scientists.
– # –
PROJECT 9: Evaluating Performance of Biological Life Support Components Installed within the Mobile Analog Space Habitat
Lead: Donald Jacques
Background: A Biological Regenerative Life Support System needs to provide not only environmental support for a team, but a variety of food, water processing, and waste processing. The Mobile Analog Space Habitat is equipped with a min-farm containing many species that interact in order to process a circular economy of nutrients, water, wastes, and air.
Update: Upon arrival and docking at MDRS, the MASH mini-farm was equipped with two (2) operating PhotoBioreactor with spirulina culture medium; a fish pond containing a population of approximately 55 blue nile tilapia, twelve (12) quail residing above a marsh area, 100 meal worms, 100 red wiggler worms, and a garden partially planted with food crops. This experiment represents the first time the MASH has integrated all these species in a semi-closed environment.
During the first few days of the mission each population continued to thrive, while a third PhotoBioreactor was being prepared for inoculation, additional crop seedlings were transferred from the seed trays into the media bed, and kitchen wastes were introduced to the worm bins. A noticeable odor began to appear at Sol 3, as well as increased turbidity in the fish pond. Closer evaluation revealed that the both the quail and tilapia populations were too large, and generating greater guano than anticipated for the system to absorb. A cascade failure, increasing ammonia far beyond the ability for the media bed to remediate, precipitated the loss of a total of 65 tilapia. At Mid-Mission, the quail continue to thrive, as are the crops, the worms, and the spirulina. Additionally, at Sol 4, the amount of kitchen wastes from the hab exceeded the capacity of the system to absorb.
Future remediation will begin with 1) 50% reductions in both tilapia and quail populations, 2) Increase in both worm populations by at least 200%, 3) addition of the population of Black Soldier Fly Larvae to the toilet as additional composters, 4) the addition of a two chamber sump between the marsh and the garden to facilitate transitioning the guano to the compost bins, 5) additional water volume in the sumps to increase bacterial load for ammonia processing.

Three PhotoBioreactor tubes aboard the MASH.

Enclosures for tilapia (lower left), mealworms, (middle left), and quail (upper right).

Planting beds aboard the MASH.
– # –
CONCLUSION
We look forward to continuing and completing our projects in the remaining sols we have at MDRS.
# # #




















You must be logged in to post a comment.