[category science-report]
Mid-Mission Research Report – Crew 297
Progress of Crew Research Projects:
Title: Simulated Deployment of a Nuclear Power System: Logistics and Operational Challenges
Principal Investigator: Matthew Lynch
Current Progress: After some initial challenges with coordinating our "hide and seek" strategy of the NPS due to technical errors in converting between GPS datums, the remaining work for this project has had repeated success. Both Teams A & B have each had a successful "seek" EVA twice, using numerous search strategies. So far the most successful strategy has been the "High-point" method, in which seekers ascend local high elevation points and observe their immediate vicinity, repeating until the NPS is found. The second most successful strategy has been the "sweep method" in which EVA members stand a good distance apart (100-200 feet) and sweep through the search area together. Hiding the NPS has also been successful as it has given ample opportunity to study the Martian environment for interesting geological sites, as well as possible excavation sites for the NPS. There also has been two success instances of burying the NPS. Both attempts used the same tools and general method, but had significantly different terrain. Our initial results have shown that the actual excavation rate varies from 30 cubic feet an hour in challenging terrain, to 53 cubic feet an hour in near-ideal terrain. Digging crew’s have utilized a 1-on/X-off work strategy, where 1 crew member works at a time at a rigorous pace, while the remaining crew members rest, frequently switching positions. This has been done with 2 and 4 person crews, a normalization study may be done later to help account for digging rates between crews of different sizes.
Title: Advancing Planetary Mineralogical Analysis: Evaluating the Usability of Portable Gamma Ray Spectroscopy during Martian Operations
Principal Investigator: Sarah Lamm
Current Progress: This research is testing the practicality and feasibility of a portable Gamma-Ray Spectrometer in the field. For this study we are using a RS-125 Gamma-Ray Spectrometer, which is 25.9x 8.1x 9.1cm at 2 kg, with a rubberized grip, and dust protected, one button operation, and sound loud enough to be heard in a helmet over a fan. The assay was set at the standard 120 seconds, reading wt% of radioactive potassium (K), and ppm of uranium (U) and thorium (Th).
Stop 1: At 12S 518065 4250003 we ran initial Gamma-Ray Spectrometer readings of the tan and red regolith. The mounds of this region are unconsolidated fine grain clay minerals with desiccation cracks. The potassium amount in the red regolith was about double of the potassium in the tan region. Based on the Th/U ratio, it shows that the red regolith was oxidized, which makes sense based on the other observations and the red coloring is likely from iron oxides-stained clay minerals. The Th/K ratio indicates that the clay minerals inside both regolith are likely smectite.
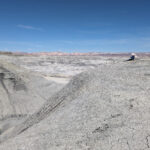
Stop 2: At Robert’s Rock Garden (12S 518278 4249467), further south than Stop 1, we observed conglomerates that were from a higher layer, that had fallen due to lower layers being eroded away. The conglomerates are poorly sorted from gravel to sand size, clast supported, and likely a silica matrix (Figure 1). The K, U, and Th amounts were significantly below the average amount in the previous region.
Stop 3: Further south from Robert’s Rock Garden at 12S 518819 4248714, we found an area that’s regolith looked redder from orbit than the surrounding region. Here we found red and white regolith. The red regolith (Figure 2- left side) had larger desiccation cracks than the white regolith (Figure 2- right side). The K in the red regolith was more than double the white, indicating that the K was likely leached out. The red regolith in this region did have a slightly higher Th/U ratio than the red regolith at Stop #1 indicating that this area likely had higher Redox change.
Gamma-Ray spectrometers seem to be practical as they can be small and durable enough to be used in the field with gloves and a space suit. Furthermore, they can give rapid assays of radioactive material in the field which can be used for determining lithology and past aqueous events but also things like risk of Radon gas for astronauts.
Title: A Toolset for Shared and Long-term Document Management and IT Operations
Principal Investigators: Sean Marquez & Matthew Storch
Current Progress: The WIDGIT project got off to a fast start, as Matt S & Sean were able to accomplish all of the following during our first day at MDRS:
Set up a local WiFi network 100% independent of the Internet
Get the WIDGIT server configured on that independent network, and accessible via NoMachine (as the monitor and keyboard we have available are only useful for rudimentary work)
Finish the configuration of 3 workspace sessions for crewmembers that did not have adequate hardware to run the workspace locally on their own laptops
Clone the notes repo for each of the server-based workspaces
At that point WIDGIT was in a usable state. However, as the mission got into full swing, the crew focused on EVAs and various other required tasks, and were also dealing with several power outages per day. Therefore we could not find enough time to conduct the crew’s WIDGIT training until Sol 4. Even then, only two crew members fully participated in the training while a third participated partially.
As of Sol 5, the two PIs and two other crew members are using the system. In particular, the GreenHab Officer has been pushing GreenHab reports into Dendron. The MDRS Handbook has also been incorporated into Dendron except for the Appendix. An additional use case is to use WIDGIT to write this Mid-mission Summary Report, thereby demonstrating that collaborative workflows can be accomplished on a purely local network.
Use cases for the remainder of the mission include crew members using WIDGIT for research notes and writing the final report. The PIs had originally envisioned additional use cases, such as running the FPrime data collection system for monitoring environmental conditions in the GreenHab on the same fully local network.
However, the reality is that WIDGIT has more overhead in terms of both learning and operations than conventional internet-based tools, and the crew already has an ambitious schedule for EVAs and other research projects. In addition, many other activities (cooking, cleaning, etc. while dealing with power outages) are taking more time than anticipated.
Title: MDRS IOT-Assisted Data Collection Using OSHW & OSS
Principal Investigator: Sean Marquez
Current Progress: Setting up the initial localized IT infrastructure (codename, WIDGIT) was successful as of Sol 1. However, due to the EVA schedule, cooking duties, GreenHab duties, and recurring power outages, there’s been little to no time to set up and configure the environmental sensors needed to collect environmental data from the GreenHab using FPrime. The plan is to continue to attempt to configure the sensors as the mission continues, if time permits.
Title: Use of Sonar for Measuring Water Tank Depth
Principal Investigator: David Laude
Current Progress: This research project would replace acquiring the distance of the static tank opening to the water surface with a ruler, for determining the remaining volume of water, to acquiring via an electronic sonar range finder device, specifically an LV-MaxSonar. The volume can subsequently be determined by the sensor’s output signal measured with a digital voltmeter (DVM) and then entered into a spreadsheet formula that calculates daily water usage and water remaining.
Initial testing on a nearly full tank did expose a problem. Inside the tank, near the top opening, there is a wide hose that spans across much of the top area. This hose interferes with measurement as one would expect. However, the hose lays mostly in the tank half closest to the Hab and placement of the device near the opposite side is all that’s needed for an accurate reading. As the tank lowers, more measurements will be needed to determine if accurate to near empty. Initially I had thought to further develop it, for a subsequent crew assignment, to indicate gallons remaining in a three digit display. However, now seeing the water usage spreadsheet with its input in units of inches, and output in gallons and average use, I believe it best for the final device to output in inches. This would also make it possibly usable with other different sized tanks, assuming different formula parameters.
Title: Robot Competency Self-Assessment at MDRS
Principal Investigator: Nicholas Conlon (at CU Boulder, on Earth – Pawel Sawicki supervising project at MDRS)
Current Progress: Despite suffering a couple of setbacks, the Robot Competency Self-Assessment study, involving Case, is still on track for a successful completion. The primary goal of this study is to understand how future astronauts involved with robotic applications rely on telemetry, map data, and intuition in order to infer how competent a robot will be within a given environment. Thus, fundamentally the goal here is to understand how the crew will utilize the rover, whether or not it is as fully functional as initially intended. One such nonconformance occurred prior to mission start, when the first-person view camera (not used to meet any of this research’s objectives) was not working due to a ssh public key authentication error on the connected Raspberry Pi. This issue persisted through the first set of EVAs. There have been two EVAs involved with Case so far: EVA #5 and EVA #8. EVA #5, occurring on Sol 4, involved fairly nominal operation of the rover. Although the rover would occasionally not reach Points of Interest (POI), this was easily overcome with manual override driving. Using synchronized manual and automated driving sequence, an adequate portion of the EVA area was captured on Case’s GoPro which will be post-processed post-mission to develop "Street view"-like imagery. EVA #8 on the other-hand did not have the same amount of luck, as Case was not able to connect to the local network. Troubleshooting efforts were futile.
Both anomalies of Case are being investigated and have a path forward to resolution. Since Case requires transporting a noteworthy amount of ground support equipment (GSE), local tests around the Hab will be first utilized until trust can be established in the reliability of Case. These local EVAs will allow for more efficient troubleshooting and off-set the missed time of EVA #8. Further, the crew has incorporated the available space on Case’s chassis, attaching a Geiger-Muller Counter which will be used to simulate an approach of the [inert] NPS, and ascertain the radioactivity around the Hab.







You must be logged in to post a comment.