Mars Desert Research Station Mission Report
Crew 200 – Mars Society International Crew
Dec 1st- 16th, 2018

Crew Members:
Commander: Dr. Ilaria Cinelli
Executive Officer: Oakley Jennings-Fast
Astronomer: Andrew Foster
Geologist: Dr. Jun Huang
Engineer: Antoine Bocquier
GreenHab Officer: Makiah Nicole Eustice
Health and Safety Officer: Dr. Lindsay Rutter
Table des matières
Introduction 3
Nominal Mission Plan (1st – 9th December 2018) 3
Extended Mission Plan (9th – 16th December 2018) 15
3 Member Crew Observations & Risk Analysis 22
Observations 22
Hazard analysis 23
Suggestions and ideas for MDRS and the Mars Society 27
Introduction
Crew 200 Mission Plan is an international mixture of science work, education and outreach. The Mission
key values are:
- International
- Diversity
- Education
The initial mission duration for the whole crew is 1st to 9th December, however as some members are able to stay longer, an extension of the mission was proposed and approved. Thus, this has enabled to study how a reduced crew (3 members) can successfully extent a mission and adapt its crew dynamics after the whole crew is reduced (emergency leading to have part of the crew to come back to Earth, accident, loss of members, etc.)
The Nominal Mission Plan is firstly described and completed with its results, followed by the Extended Mission Plan. In addition, a section analyses our experience as a 3-member crew while the last section contains suggestions and ideas for MDRS and the Mars Society.
Nominal Mission Plan (1st – 9th December 2018)
Laid out here is a summary of the crew’s planned research projects while at the MDRS:
- Crew Projects
- Mapping emotions (by Commander, I. Cinelli):
Introduction: Emotions and feelings are altered by the environment, and isolation has been
shown to impact human behaviours. Arts is used in this project to communicate how a person could experience endurance in isolation using colours.
Rationale: Mapping emotions in isolation for envisioning endurance
Methods: Since young age, I. Cinelli associates words and numbers to colours, that she sees
distributed in space with an order depending on their meaning. Emotions and feelings will be
mapped throughout the adaptation in isolation. Acrylic colours will be used to map emotions on
a flight-suits.
Results: The mapping too longer than expected. The painting is not completed because of time restrictions, as the flight-suit was pained in anywhere (front and back included). However, the flight-suit includes the main features of the design I had in my mind. The picture refer to a phase of the painting, it is not the final version.

- Cement using Local Soil and Simulated Soil (Oakley Jennings-Fast Executive Officer)
Introduction: Objective is to test the strength of premix concrete (cement plus Earth soil as aggregate) and Portland cement plus local soil and Martian Regolith. Rationale: Important for understand building structures on Mars using available materials on the planet. Methods: Mix various ratios of cement and local soil, simulated soil and water and test the strength with known force until failure.
Results: Dropped a hammer of known weight from a known height until breakage. Clamped each brick at the midpoint with clamps. Premix concrete (with Earth soil and aggregate and cement) broke at the lowest force (from 2 inched height of the hammer). Local soil was used in various ratios with Portland Cement: 1:1 ratio, 2:1 ratio of Portland cement to local soil, 3:1 ratio of Portland Cement to local soil. As predicted, the brick with the highest ratio of Portland cement required the highest force to break. It appears there is not a linear relationship between force needed to break and ratio of soil. The 1:1 ratio of local soil and cement broke at a height of 10 inches. And the 2:1 and 3:1 ratio of cement and local soil required over 20 inches of height to break. More replicates need to be performed in the future and additional experiments using only local materials (such as clay and sand) and no cement. This would replicate more closely what would be done on Mars.

- Search for Extremophiles: (by Lindsay Rutter, Health and Safety Officer)
Introduction: Understanding what microbes survive the Mars-like environment around the
MDRS can serve as a proxy to the type of microbes that may survive Mars itself. Identifying
sample microbes can be achieved with commercial-made microscopes, but can also be achieved
with homemade microscopes in the event that a more official microscope is not available.
Rationale: Detecting microbial life on Mars would be an incredible discovery that would answer a long-standing question from humankind about whether we are alone in the universe. Such findings would have major implications for adhering to planetary protection ideals, protecting the immune systems of space explorers, and understanding life in the universe from broader contexts.
Methods: We collected four soil samples (dark red, orange, grey, and brown) and one snow sample from nearby the Mars Desert Research Station (MDRS) during an extravehicular activity on December 5, 2018. We collected a fifth soil sample (purple) during an extravehicular activity on December 6, 2018.
We then examined the six samples in the ScienceDome of MDRS between December 5, 2018 and December 7, 2018 (Figure 1A). For each of the five soil samples, one part soil sample was diluted with nine parts distilled water. Each beaker containing the diluted soil sample was gently shaken and stirred (Figure 1B). A pipette was used to transfer one drop of each soil sample onto a microscope slide. The field was examined at three resolutions (40x, 100x, and 1000x). Photos were taken for each sample (Figure 2).
A homemade microscope was also made in the Repair and Maintenance (RAM) building of MDRS on December 6, 2018 (Figure 3A-D). The lens from two laser pointers were extracted using clamps and handsaws and were attached to an iPhone camera using Mounting Putty. Paper and plastic were used to cover a flashlight to serve as a proxy for microscope lighting. Magnification of the makeshift microscope was estimated using rulers and comparing to known resolution of microscope in ScienceDome.
Results: The only sample to show possible evidence of microbial life was Sample 4 (purple soil). The homemade microscope did not produce enough resolution for this study.
Conclusion: There is very tentative and preliminary evidence of microbial life in the purple soil sample from nearby the MDRS. The homemade microscope was unable to reasonably search the samples taken from nearby the MDRS for microbial life.
Discussion: Due to time limitations, each sample was observed five times (one drop each). We note that the purple soil sample only showed possible microbial life in two of the five samples, indicating substantial sample variability. In light of this, future work should observe a larger number of repetitions from each sample. The possible microbial life found in the purple soil samples will need to be investigated further alongside experienced microbiologists. The low magnification of the homemade microscope may be due to the lens in the laser pointers purchased for this project; it is possible that another laser pointer may have provided a lens that produced enough magnification for this project. It may also be possible that the flashlight within the homemade microscope did not provide enough light to penetrate the depth of the sample. Further investigations into these possibilities are future avenues for this line of work.
 Figure 1: (A) Six samples from nearby the MDRS station. (B) Six samples after dilution.
Figure 1: (A) Six samples from nearby the MDRS station. (B) Six samples after dilution.
 Figure 2: Six samples under the microscope at 100x magnification.
Figure 2: Six samples under the microscope at 100x magnification.
- Energy Exchanges: Modeling and measurement of the thermal exchanges of the Habitat. (by Antoine Bocquier, Crew Engineer)
Introduction: Modeling the energy behaviour of the Habitat is key to optimize the use of available resources. By building an energy model of the Habitat that can be validated by in site measurements, it would be possible to adapt it to a Martian environment.
Rationale: A Martian station will need to be a “smart building” enabling to monitor resources use and perform failure detection and recovery. In MDRS, it will be useful to have a better assessment of the thermal power dissipated compared to the one generated.
Methods:
1) Build a simplified energy model of the Habitat using the bond graph method
2) Take measurements via an infrared camera of the Habitat and find out its parameters to refine the model
3) Compare software simulations with measurements to validate the model
4) Adapt the model to a Martian environment
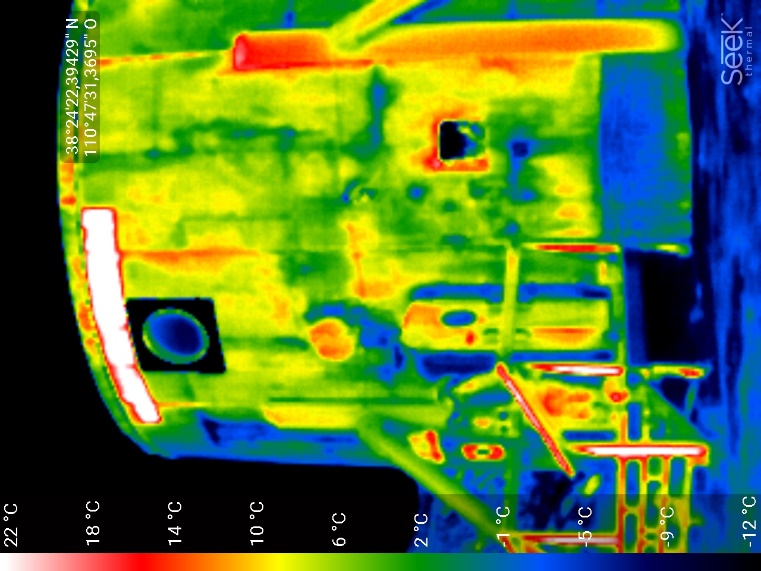
I have been very pleased to conduct this project which gave me the opportunity to better understand the station structure and power systems. In a first place I created a first simplified energy model of the Habitat, understand its physical behaviour and the station power chain (which I was also monitoring as Crew Engineer). During my first EVA (Wednesday), I used my infrared camera to acquire a first thermal map of the Habitat, experiencing constraints that will be to take into account on Mars (harder to use the camera, longer measurements than expected, variability of environmental conditions). From this data, I was able to find the different thermal areas in order to refine the model and better understand the building energy behaviour. On the other hand, I used the infrared the camera inside the Habitat to have an internal thermal map, while analysing the physical structure of the building (measuring the building layers, identifying the materials, etc.). I also performed two experiments to find the thermal conductivity of the wall, however my first analysis of the results let me think it will not be precise enough (I would need to heat a larger area or better use the weather conditions).
Eventually I was able to refine the energy model of the Habitat, including the identified thermal resistances and physical properties. I have simulation results which are physically valid, which is a good point given the complexity. Yet the comparison with my measures indicates that the model is not yet precise enough for me to go to the next step in order to include the power generation (solar panels, generator, propane heater and devices consumption).
Although satisfied by the approach taken and the lessons learnt, especially via the experimental approach in a Martian environment (necessity to anticipate more and take into account safety/environmental constraints), I have been limited by some points. The environmental conditions vary, which can have an impact on the measurements: the snowy weather prevented to perform more daily measures or in special conditions (e.g at dawn) and the weather station data cannot be accessed. I also realised than the Crew Engineer daily tasks and the crew common tasks need more time than expected. Besides, the media visits in a short time were interesting but I had to dedicate more time expected. Finally, I recognize the topic is a complex and ambitious one, with much unknown parameters which need rigorous time and effort.
An interesting point is that the project coincided with other crew members projects, from the power generation study, automatization of the station resources to Martian construction. This reveals how much we can contribute together to everyone’s projects, bringing added value to larger projects.
Although the mission is coming to an end, I intend to expand the project to have a fully operational model that can be valuable for further projects (especially at MDRS). Staying with a part of the crew for a prolongation week, I will make the model more precise by analysing each energetic component of the Hab with new measurements. Once validated, including power generation systems, I could improve the model with convection/radiation phenomena, for which I measured some of the key data. Finally, having gathered data about the Martian environment, I could adapt it and complete fully the project. Some infrared measurements performed in EVA:
- GreenHab Outreach (By Makiah Eustice, Greenhab Officer):
Introduction: Grow experiment at same time as a school in Canada
Method: Plant salad seed, check height each day
Rationale: Outreach to promote Mars exploration and green livinac
- Mars VR (By Makiah Eustice, Greenhab Officer)
Introduction: Develop and film walkthroughs of training scenarios
Rationale: Crew 197 didn,t complete these tasks.
Method: Decide on training scenarios, practice, and film (annotate)
Results: Learned steps of setting up and down the Solar Observatory, doing an Engineering Check, and EVA Prep. These steps will be used to make the training scenarios with first person video. I gathered more ideas from the Mars VR team.
Completed: Hab tour
Partially Completed: Engineering Check, Solar Observatory
Needed: GreenHab operations, Soil Collection and Analysis, EVA Prep, Rover start up
- MDRS Digitization (By Makiah Eustice, Greenhab Officer):
Introduction: Understand sensors and electronic systems an find ways to implement “Smart Hab” system
Rationale: Mars would have smart systems that are connected, controlled, and archived for real time decision making
Method: Track all systems (water, power, environmental, telemetry) and find ways to improve
Results:
- Tracked existing systems for power, water, and environment.
- Gathered ideas for sensor/telemetry/intranet system that would centralize data to Hab
- Made sample display of future HAL system for centralized data
- Prototype code that extracts data from reports and imports in Excel
List of needed devices/ questions
Conclusion
- Previous operations have very loose understanding of power and water consumption beyond what is put in the Engineering Report. Also, most of the information is wasted and inaccessible for modelling and analysis.
- Smart monitoring systems could be implemented with off-the-shelf devices
- Extraction of data from sensors or even reports would not be hard to program and implement
- Schools Outreach (By Andrew Foster, Crew Astronomer)
Introduction: Inspire the scientist and engineers of the future through a schools outreach project
Rationale: The colonization of Mars will involve people of many nationalities and backgrounds working together towards a common goal. Education and outreach is the foundation for this great project.
Method:
Engage school and community in Western Qatar with a variety of exciting projects:
1. School
1.1 Year 8 HAB design – HAB design questionnaire “Ask The Experts” (from PHSE lessons), to be carried out @ MDRS. Questionnaire results to be presented in PHSE lesson late December.
1.2 Year 7 Science club – Introduced science project list. Follow up questions to be sent before mission start.
1.3 Primary Yr 6: Light project, two experiments:
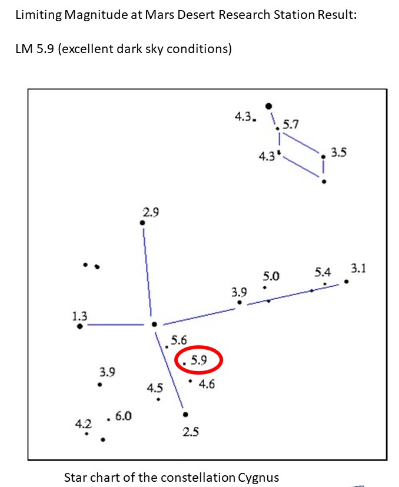
i. Measure and compare Naked Eye Limiting Magnitude at Dukhan and MDRS, using star chart for Cygnus.
ii. Construct a Cooking Oil Differential Photometer, measure and compare sunlight transmission at Dukhan and MDRS.
1.4 Primary (Yr 3-6) Question List – Compilation of all questions from classes
1.5 Oryx award students (yr 12): Climate change project- Assess energy supply and usage at MDRS, use as input for a sustainable energy project.
1.6 Outreach: Maintain blog site, send at least daily updates for all projects. (text / photo / video) during the mission.
Results:
1.1 Year 8 HAB design Questionnaire – Objective met: Two group discussions carried out during mission. All questions discussed and writted feedback compiled, to be presented to Year Group on return to the school in PHSE lesson late December.
1.2 Year 7 Science club – Objective met – follow up science questions answered by group, to be presented on return from Mission.
1.3 Primary Yr 6: Light project, two experiments:
i. Measure and compare Naked Eye Limiting Magnitude: – Objective met: NELM at station 5.9, using Cygnus constellation as reference. School students to compare with local sky conditions on return from mission.
ii. Construct a Cooking Oil Differential Photometer, measure and compare sunlight transmission at Dukhan and MDRS. – Objective not yet met (cloudy conditions), awaiting gap in weather (sunlight) to carry out experiment.
1.4 Primary (Yr 3-6) Question List – Compilation of all questions from classes – Objective met – all questions answered and will be presented to school students on return from Mission.
1.5 Oryx award students (yr 12): Climate change project- Assess energy supply and usage at MDRS, use as input for a sustainable energy project. – Objective not yet met (ongoing), still required to share energy use results with crew members.
1.6 Outreach: Maintain blog site, send at least daily updates for all projects. (text / photo / video) during the mission. – Objective met.
2. Scouts
(Dukhan Troupe 33101) – Mission logo design competition complete. 2 x science experiments:
i. Biology / Greenhab food growth rate comparison “Cress Race” comparing GreenHab to local growing conditions.
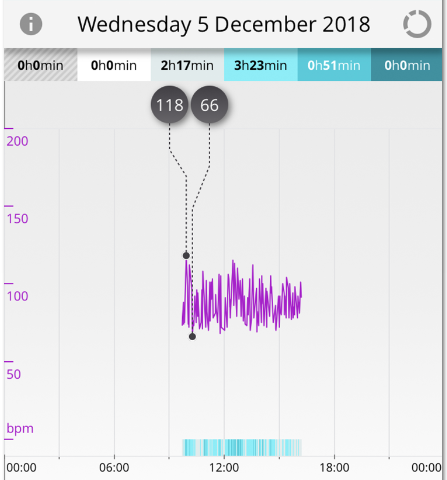
ii. Human factors / space suit / EVA impact on heart rate using fitness monitor & app.)
Results:
i. Biology / Greenhab food growth rate comparison. Objective met: Watercress planted & growth rate measured over course of mission (average growth rate 1cm per day). Results to be presented to Scout Troupe, and second half growth comparison experiment to be carried out locally.

ii. Human factors / space suit heart rate – Objective met: Measured heart rate response in preparation for EVA, during EVA, return to airlock and removing equipment. Carried out comparison measurement, brisk walking at constant pace 1 km (around solar observatory). Results to be presented to Scout Troupe 33101 on return from Mission.
- Mission Astronomy (By Andrew Foster, Crew Astronomer)
Introduction: Carry out a mixed Astronomy program consisting of science measurements and astrophotography. Take some beautiful images and share them with the community.
Rationale: Utilise the great astronomy facilities at MDRS, demonstrate the capability of the MDRS observatories by contributing to the science community and delivering some beautiful astrophotography as a means to engage the public.
Method:
i. Science / Astrophotography – Differential Photometry w/ American Association of Variable Star Observers
ii. Cometary Coma Morphology imaging (Planetary Science Institute campaign)
iii. Wide field astrophotography campaign.
iv. Solar prominence time lapse imaging.
Results:
i. Science / Astrophotography – Differential Photometry w/ American Association of Variable Star Observers: Objective partially met: Images of two variable stars acquired with MDRS-14 (AG Peg / RW Aur). Image processing and submission of photometry data to be carried out (post processing) after return from Mission.
ii. Cometary Coma Morphology imaging (Planetary Science Institute campaign): Objective partially met: Cometary coma imaging captured with MDRS-14, image post processing and data submission to be carried out after return from Mission.
iii. Wide field astrophotography campaign. – Objective partially met: Images obtained for M45 (processed / submitted), 46P/Wirtanen image acquisition ongoing with MDRS-WF. Further images to be submitted to Skynet by end mission, post processing and submission to MDRS reporting to be carried out after return from Mission.

iv. Solar prominence time lapse imaging. – Objective not met, daytime cloud cover for duration of mission. Visual observation of Sun carried out during short breaks in cloud during Mission. May be possible to carry out solar imaging last day before return from Mission.

Additional Results:
Imaging of Quasar 3C 273 w/ MDRS-14, post processing to be carried out on return from Mission.
Night sky astrophotography – Milky way above HAB, and light painting photography exercise.
- Results: Drone application in geological mapping, EVA planning and crew member rescue (By Dr. Jun Huang, Crew Geologist)
- Completed mapping the adjacent region of the Hab. Build a 3 dimensional model of the Hab to provide assistance to the energy exchange modelling.
- Completed mapping mesas south east of the Hab. The digital elevation model and orthomosaic of this region will be completed afterwards due to very limited computing resources. This centimetre resolution DEM and orthomosaic will be helpful for future geological mapping and EVA planning.

-
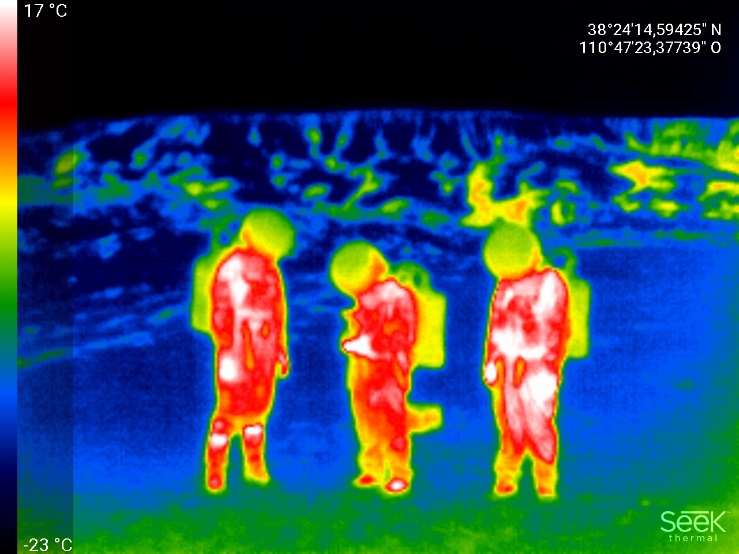
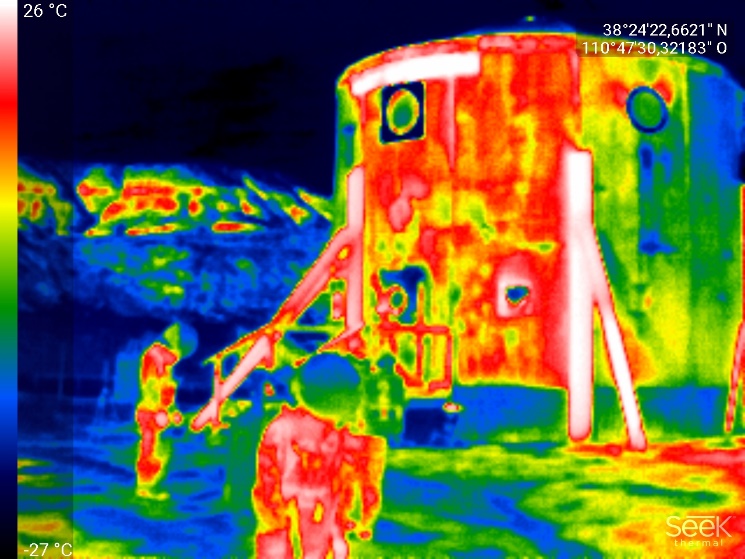
- Completed a crew rescue scenario with drone. The HabCom will keep track of the locations of EVA crew members by asking them to report their locations (GPS points). If anything emergency happens, the HabCom can fly a drone to the crew’s location and its adjacent region to search for the crew members. The drone application for crew search and rescue will be extremely helpful in winter time when equipped by a thermal camera.

Extended Mission Plan (9th – 16th December 2018)
Makiah Eustice, Lindsay Rutter and Antoine Bocquier stayed for an extended mission. They simulated how to deal with a drastic crew reduction that could be cause by an emergency situation (crew members having to get back to Earth or another Martian base, accident and loss, etc.). They investigated how to readapt themselves to have still working crew dynamics but also ensure to maintain the station working and science to be performed. They also studied how to readapt MDRS procedures to this situation, so as to ensure safety and possibilities to work as a reduced crew (questioning how small a crew can actually be?).
The projects that have been studied are the following:
- EVA with 3 crew members (by Lindsay, Makiah, Antoine):
Introduction: situations on Mars where 3 crew members would be left may happen. They would need to be able to perform EVA to run the base, explore and perform their mission. Thus, we will investigate how to perform such EVA, having 2 members in EVA, 1 in the Hab as HabCom and the MDRS Director as potential backup (simulating a station AI for example).
Rationale: It is needed to investigate how to adapt normal procedures to a reduced crew, ensuring safety.
Methods:
Perform EVA for 3 days to assess the radio coverage from the Hab, in order to define a safety perimeter where scientific EVA could be performed as usual. Perform both a walking EVA close to the Hab and map out locations that allow for radio communication between EVA crew and HabCom, and driving EVA to map further regions. One EVA member would drive the rover, while the other EVA member would provide HabCom every sixty seconds with a sequential location test number (“Testing location 1”, “Testing location 2”, etc) and would write down the corresponding GPS coordinates for that location test number. The HabCom member will respond with “Roger that” each time they hear a location test number, and will record a list of the location test numbers they heard and associate each one with a standardized signal strength and readability score (https://en.wikipedia.org/wiki/Signal_strength_and_readability_report).
The maximum time for an EVA will be two hours due to potential increased risks of a reduced crew EVA. The HabCom member will rotate each day. Our tentative daily plan would be as follows:
- Monday (December 10): Walking EVA to Phobos Peak
- Tuesday (December 11): Driving EVA south to Robert’s Rock Garden and north to intersection with Galileo Road
- Wednesday (December 12): Walking EVA to Hab Ridge
- Thursday (December 13): Pushing south past Robert’s Rock Garden or pushing north past intersection with Galileo Road.
- Friday (December 14): Pushing south past Robert’s Rock Garden or pushing north past intersection with Galileo Road
Results
This project was successfully performed. We proceeded iteratively, day by day, by proposing an EVA protocol to apply, collecting data and feedback in order to improve the procedures.
Thus, we performed a series of 2hrs walking and driving EVAs from Robert’s Rock Garden, to Phobos Peak, Galileo Road and Reservoir Dam.
We defined clear responsibilities and communication between the HabCom and the EVA members to ensure efficiency in our radio coverage campaign but also to deal with loss of signal. Performing radio checks every minute, completed by GPS coordinates transmitted every 5mn, we were able to safely localize the crew even when contact was loss (after 5mn without, the crew had to come to a previous safe point). In addition, we mapped the quality of the radio coverage with the Habitat, from both sides.
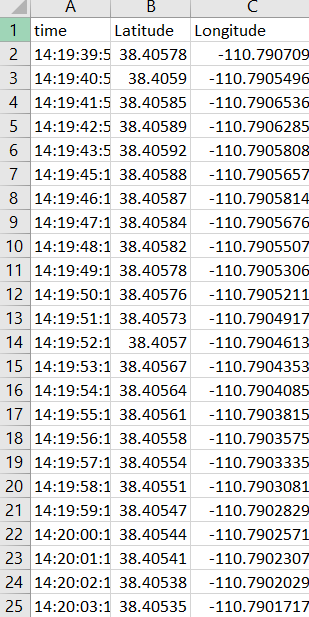
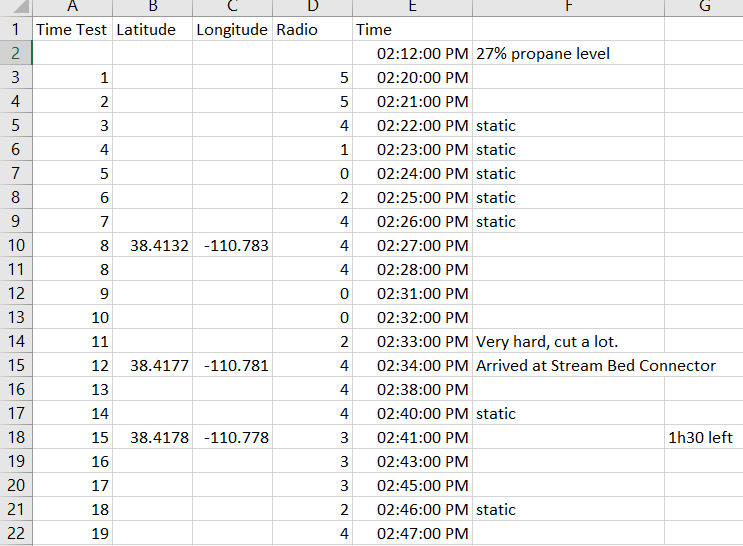
We used Excel to merge GPS data (acquired via PhysicsToolBox), time and radio quality data.
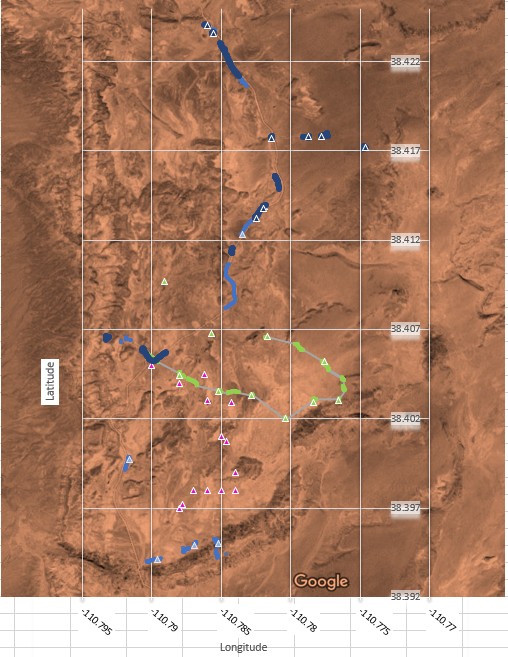
Triangles are hand-acquired data (1 color per EVA) while points are automatically GPS-acquired data.
We believed assessing radio connectivity and strength could be of use for future crews to continue and possibly be used to assess location suitability for radio relay. As a result, we used R statistical software to develop a brief application where users can upload a CSV file containing coordinates (latitude and longitude) and overlay these as points onto a map of the MDRS and its surroundings. We used the ggmap R package as a wrapper that queries Google Maps. We also used the ggplot2 R package, which uses the grammar of graphics to overlay points onto the map. We published our brief application on shinyapps.io; the full website can be accessed at https://evamapsmdrs.shinyapps.io/mdrsmaps/.
Users can send issues or feature requests at https://github.com/lrutter/MDRSMaps/issues.
We hope future MDRS crew members can use this application to quickly and efficiently map out their EVA locations and metainformation. They can overlay their recorded GPS coordinates as points to determine where they traveled on their EVA. They can possibly tailor (change the color and size) of these overlaid points to represent metainformation, such as radio connectivity score for given points.
Not only we demonstrated the possibility to perform safely EVAs with a reduced crew and a rigorous approach (much more demanding that previous EVAs), but we also acquired and processed data that to procure future crews with a tool that could be useful for their EVA planning.
We also analysed some sites that could be suitable for settling a radio relay in order to expand the radio coverage from the Hab: Phobos Peak (likely accessible by north side) and a mesa close to Reservoir Dam.
Next steps to be taken:
-
- Mapping the quality signal on the geographic map
- Expanding the study area
- Settling radio relays
- Station Power Study (by Makiah, Antoine, Lindsay):
Introduction: merging and prolongation of our previous projects on the building thermal model and the power consumption study in the station (cf further).
Rationale: having a power model of the station will help to monitoring and manage it better, which is needed on Mars.
Methods: we will follow the path proposed in the sections below, to improve the thermal model with accurate data and measurements, as well as a deeper study of the energy uses in the Hab.
Results:
While Makiah led the study of the Station power study, from listing every system consuming power with its related power (estimated or indicated), Antoine improved his energy modelling of the Habitat.
We helped each other to better understand our problematics and exchange our findings, Makiah’s power study being an input for Antoine’s model.
The model (still under work) is described at macro level under:
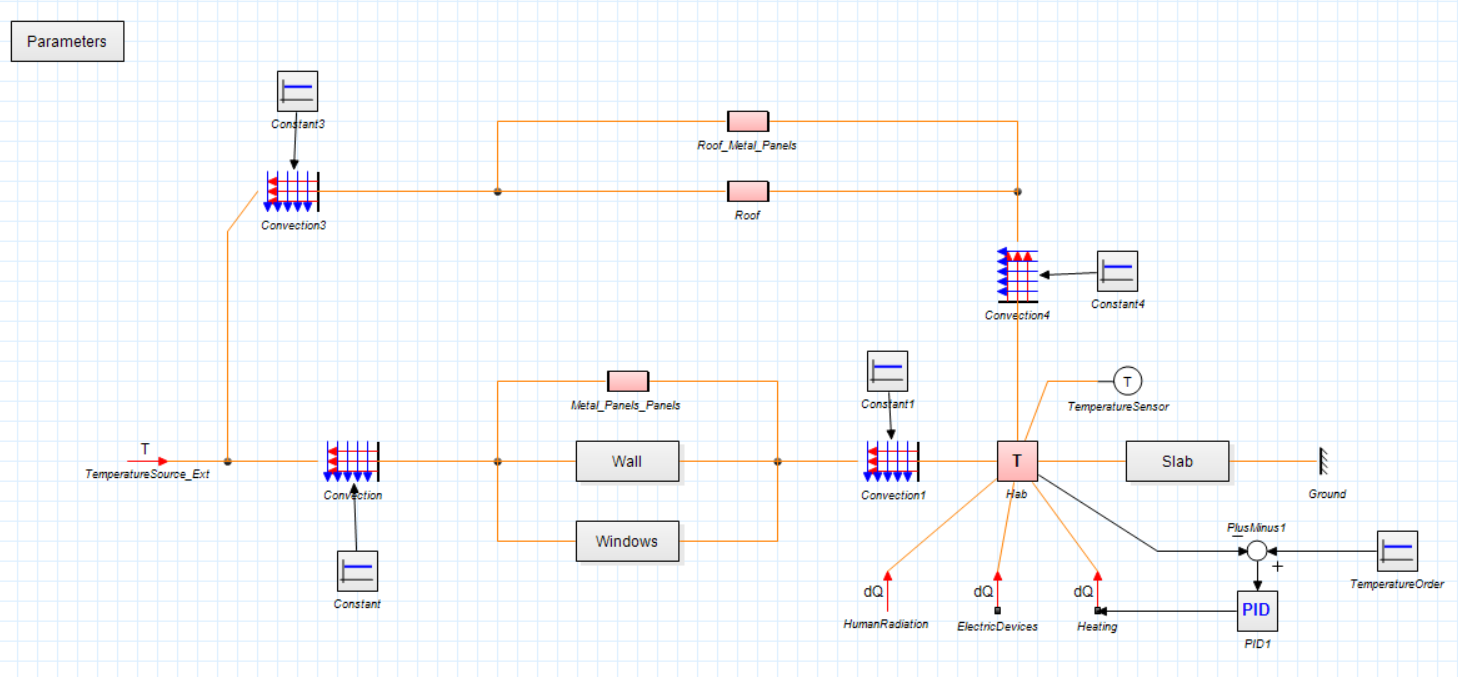
Each box describes a submodel of a component, an exchange, etc. that is described with analytical equations and empirical data (Habitat geometry, configuration, materials, power consumption…).
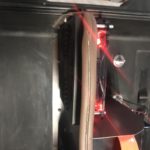
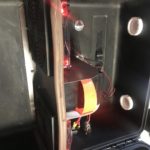
Infrared measurements of the internal/external temperatures of the building were acquired during the mission to refine the model (e.g defining thermal areas and singularities), and above all to assess it. A first qualitative comparison with the simulation enables to evaluate the physical trends (e.g which part of the building is losing the most power, etc.), while a more qualitative is still to be completely performed for refining some data (e.g conductivity, convection).
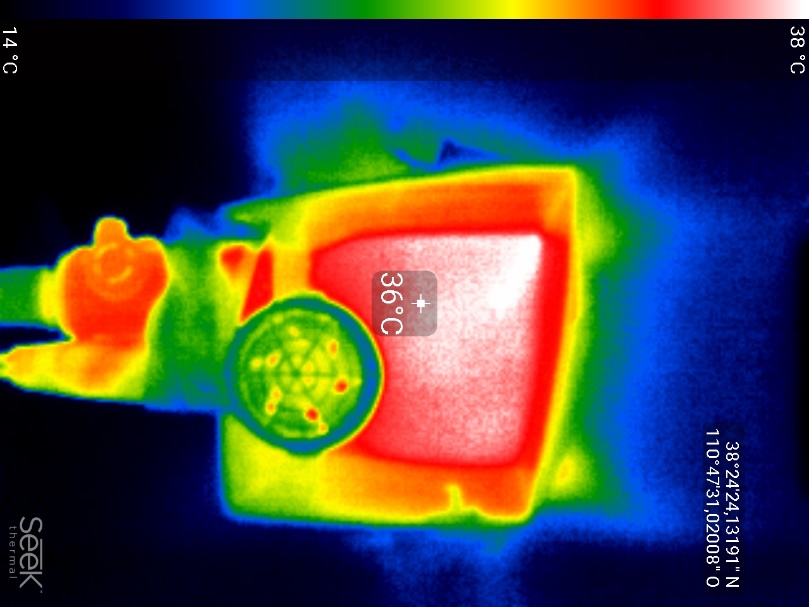
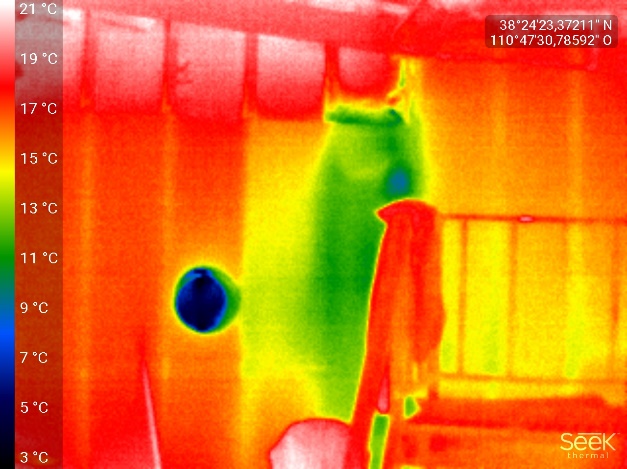
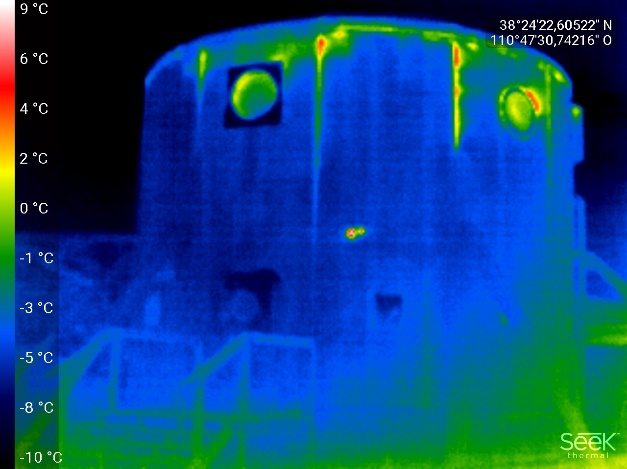
(Figures: external, internal measurements and
wall thermal conductivity experiment)
The first simulation describes the temperature evolution and heat exchanges of the Habitat, in case no heating is performed. Although physically correct, the quantitative results are not yet precise enough as they will need to take more phenomena into account (e.g solar radiation which heats the Habitat).
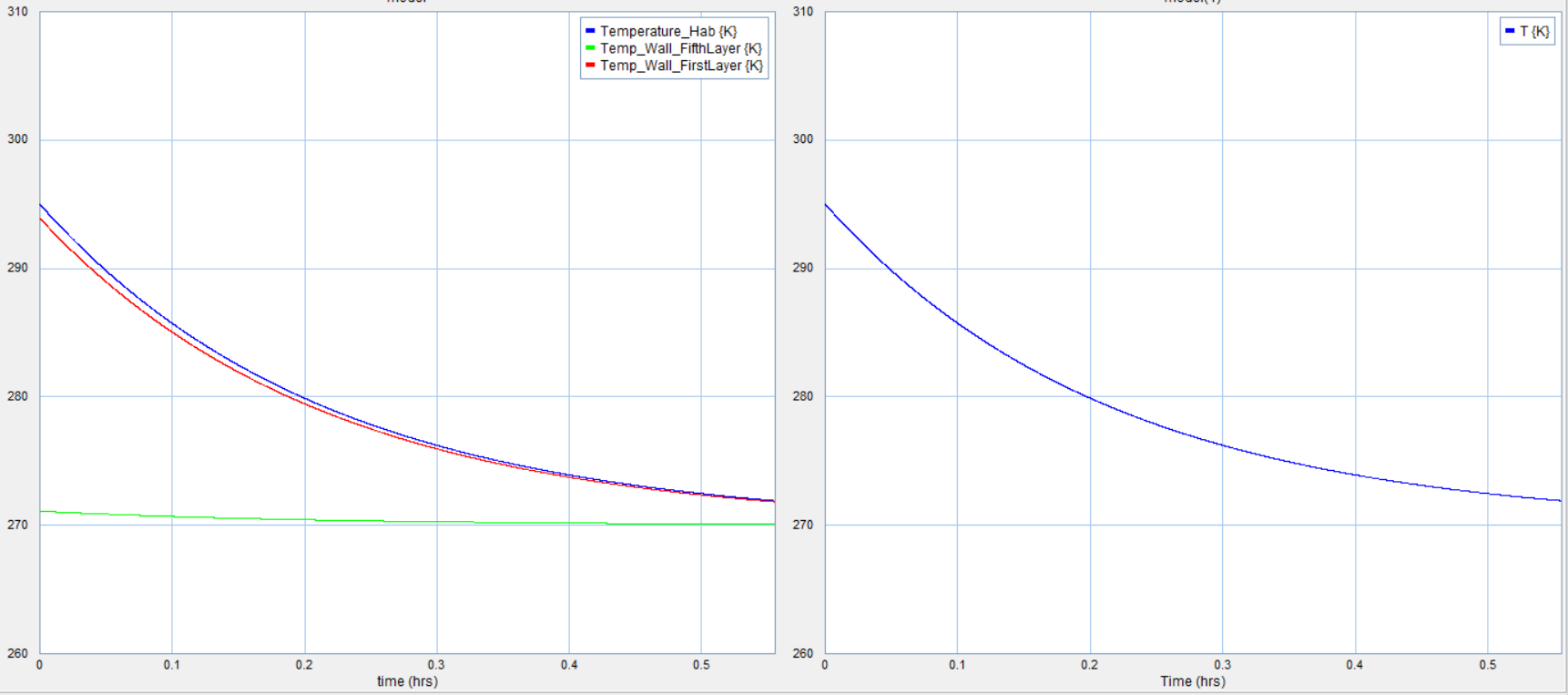
I will continue refining the model, while adding the power inputs (electric power, heating, etc.) and the thermostat control. Once done, the next step will be adapting this model to a Martian environment. This model could be in the long term integrated as a programme of a Martian smart building, in correlation with the digitalization of the base (as proposed for the MDRS by Makiah, below).
- Digitalization of the Station (by Makiah):
Introduction:
The MDRS has the potential to optimize systems that would improve the operations for future crew. Understand sensors and electronic systems and find ways to implement “Smart Hab” system and efficient transfer of information for mission support and future crew.
Rationale:
A Mars habitat would have smart systems that are connected for real time monitoring and decision making, easy communication to mission support, and anomaly prediction.
Method:
1) Track current systems (water, power, environmental, telemetry, internet) of MDRS habitat.
2) Create system requirements/recommendations for habitat sensors.
3) Create system requirements for habitat intranet and Hab systems display
4) Create sample website format for efficient display of crew reports and MDRS projects.
5) Recommendations for new capabilities for HAL (Habitat Activity Lexicon):
- Make an intranet centralized at the Hab that allows sensor data to be displayed and archived, and allow crew members to share and store files.
- Have a report sending program that sends reports to mission control through a portal that only connects to internet to send/receive mission support messages
- Have automated report generation from sensor data.
Results:
The investigator was able to isolate almost all power systems. The MDRS habitat is powered by 3 solar panel sections and diesel generator at night. Both feed into a battery, which charges the MDRS. Power sinks, such as lights and appliances, were tracked by their rated wattages, except for heating systems that also use propane. The power management system is complex and not entirely understood, but the power generation of the solar panels and the net power of the batteries can be displayed, but it can only be accessed in the Science Dome.
Water for the Hab (main living building) comes from a 550 gallon tank outside, which is pumped to a intermediary tank on the un the upper floor. Rate of flow for sinks and the shower and estimated used were recorded. There are no sensor to monitor exact water level and rate of flow; daily level is estimated through visual inspection. Water for the Greenhab (Greenhouse) comes from a separate tank with unknown capacity and no sensors.
Temperature and Humidity sensors are in almost every building, however, they are not connected to any system. Each building has a carbon monoxide and smoke detector.
The habitat receives 500 MB of data for wifi each day. To check data level, crew must connect to the internet and open a webpage.
Communication with mission support is done over personal email, sending text files and pictures of daily activity at the end of the day.
After learning about these systems, the investigator determined the most important systems for real-time monitoring and decision making. Power generation, diesel level, propane level, battery charge, water levels, temperature and power usage of each building. The most important systems for tracking over time are power (energy use) and water. Other important inputs for the crew are knowing if the diesel generator is on and if the remote observatory is open. A sample display of information that will be available in the Hab was started during the nominal mission. Since the Mars Society is redeveloping the HAL (Hab Activity Lexicon), the findings of this projects can used for the developers to establish.
The information from mission support reports is in a standardized format that can be easily read and extracted from a program. Until sensor system are installed, data can be centralized and displayed from extracted information from reports and exported to excel or an html format in python or R. The display of MDRS reports on the MDRS website can be geared towards archiving data, instead of copying and pasting reports as a post. This will be developed during the extended mission.
Conclusion:
Previous operations have very loose understanding of power and water consumption beyond what is put in the Operations Report. Also, most of the information is wasted and inaccessible for modelling and analysis for future crew. Smart monitoring systems could be implemented with off-the-shelf devices that would not need modification to building infrastructure, but would effectively improve crew awareness of their systems. Extraction of data from sensors or reports would not be hard to program and implement.
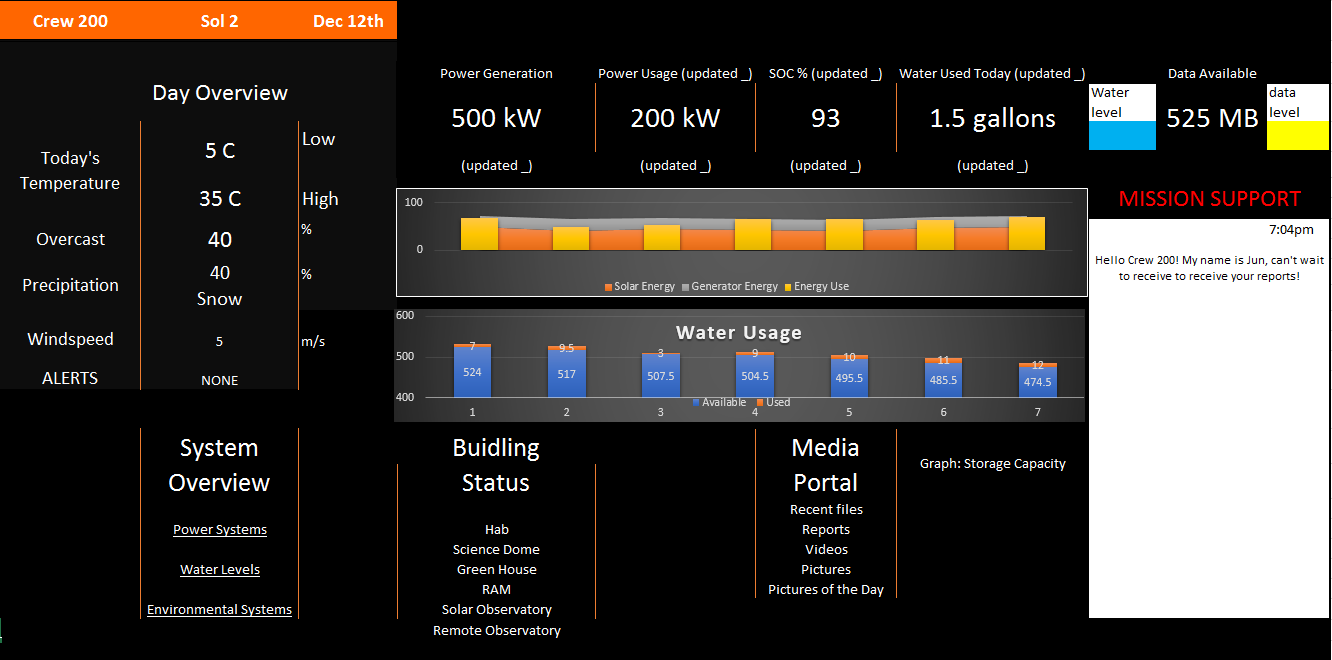 Sample HAL display
Sample HAL display
- Outreach & Education (All):
Introduction: promote the activities performed at the station, reaching out in particular to children
Rationale: inspire the public and in particular new generations to space exploration, analog missions and science
Method: daily updates on our mission blog, direct exchanges with French middle school, social media coverage
Results:
We continued feeding our blog and sharing our experience, which will be continued with local media (e.g French media). We were also recorded for the Behind the Scene of a super bowl advertising.

3 Member Crew Observations & Risk Analysis
This section gathers some of our feedback on being a 3-member crew, rearranging a new crew dynamic being seven before. We kept our roles while having a more participative leadership style, with no hierarchy.
Observations
Negative changes:
- Ratio of time used for housekeeping is increased (cooking, report writing, cleaning, etc.)
- Less expertise in diverse fields (for instance, we did not know how to keep track of observatory issues as crew astronomer left)
Neutral changes:
- Work becomes more collaborative where all three of us worked on each project together.
- Spend more time as a whole time, one deeper discussion at any given time.
- More socialization efforts needed
- More conscious of people’s activities, safety, morale.
- More alert about where the other members are and do.
- Listen to more music now since it is quieter.
- More resting after lunch, whereas with the seven-member crew, we all quickly returned to projects.
- Closer to a flat sharing, daily tasks (e.g cooking) is done all together.
Positive changes:
- Less noise at night when we are sleeping due to less traffic.
- We get to know each other more individually (e.g we discovered we had similar vision and humor);
- Lots of discussion during breakfast.
- More positive interactions with mission support.
- More aware of who is doing what reports (easier organization), we are always more aware of the other reports content.
- More dedicated to creative and expressive journalist reports.
Hazard analysis
Severity Classes:
Catastrophic – Injury or damage that would require emergency services
Critical – Major Injury, damage, or hazard that would require a break in sim
Marginal – May cause minor occupational illness, delay or property damage.
Negligible – probably would not affect personnel safety or health, but may violate specific criteria or affect work
Probability Codes:
- Likely to occur immediately.
- Probably will occur in time
- May occur in time.
- Unlikely to occur.
Risk Assessment Code (RAC)
| |
A |
B |
C |
D |
| I |
1 |
1 |
2 |
3 |
| II |
1 |
2 |
3 |
4 |
| II |
2 |
3 |
4 |
5 |
| IV |
3 |
4 |
5 |
6 |
RAC 1-2: Considered imminent danger and require immediate attention.
RAC 3: Risk needs to be actively mitigated by crew.
RAC 4-6: Non-serious but risk will be mitigated.
General Operations
| Operations and |
Hazard Potential |
Normal RAC |
3 Crew |
3 crew Countermeasures |
Normal Disposition |
3 Crew Disposition |
| Equipment |
RAC |
| Crew Electrical Shock |
Power shorts, |
3 |
3 |
Turn of power systems, |
II/C |
I/D |
| Crew Hypothermia |
Long work in Science Dome, RAM, or Solar Observatory |
5 |
4 |
Get member to a warm place in the Hab. Place under thermal blanket and give a Walkie Talkie. |
III/D |
III/C |
| Crew Thermal Burn |
Touching hot surfaces in the kitchen or Science Dome |
4 |
4 |
Run over cold water and alert another crew member. If severe, alert crew to retreave first aid kit and access need for emergency services. |
III/C |
III/C |
| Crew Isolation |
Limited interaction in day, seperated buildings |
5 |
3 |
Discuss with crew members openly about discomforts and feelings of loneliness. Schedule time in the day to spend socializing and talking about projects progress |
IV/C |
III/B |
| Severe Hab Fire |
Kitchen Fire, Electrical Fire |
3 |
3 |
Alerted Crew will alert everyone in Hab and communicate through Comms. There should be a fire extinguisher in every building. Call Emergency services and evacuate the building. |
I/D |
I/D |
| Fire in other building |
Building Dependant |
3 |
3 |
Alerted Crew will alert everyone in Hab and communicate through Comms. |
I/D |
I/D |
| Loss of Power |
No Solar power, unfunctional or empty generator |
3 |
3 |
Moniter SOC level throughout day, delegate to other members. Alert of lowering SOC or no power generation. |
II/C |
II/C |
| No water refill |
Pipes freeze over, huge pipe leak |
5 |
5 |
Make sure to keep loft tank above 6 gallons to |
IV/C |
IV/C |
| Depletion of Food |
Poor meal management, food spoiling |
3 |
4 |
Return to replensih food |
II/C |
II/D |
| Depletion of Water |
Pooor water management |
3 |
4 |
Return to town to refill water. Moniter water level and daily usage through engineering checks |
II/C |
II/D |
EVA Risk Analysis
| Operations and |
Hazard Potential |
Normal RAC |
3 Crew |
3 Crew Countermeasures |
Normal Disposition |
3 Crew Disposition |
| Equipment |
RAC |
| EVA Hypothermia |
Cold weather, limited time to heat up, wind from drving |
4 |
3 |
Carry extra pair of gloves and heating pads in cold weather. Do not let membe with hypothermic syptoms drive. End the EVA |
II/D |
I/D |
| EVA Overheating |
Hot Weather, ventilation failure, too any layers |
4 |
3 |
Prevent overexertion by not doing more than what is planeed in the EVA, do not rush to complete an EVA. Ensure Backpack is working before leaving. End the EVA |
II/D |
I/D |
| EVA Unconsciosness |
Fall from high place, medical condition, |
3 |
3 |
If at any point a member is feeling ill, the crew should end EVA. Crew must be capable of carrying or dragging a crew member. Conscience crewmember takes person to safe location. Crew member breaks sim and calls emergency services as soon as possible |
I/D |
I/D |
| EVA Open wound |
Fall from high place, sharp rock |
4 |
3 |
Take First Aid Kit before EVA . Crewmember takes injured crew to safe location. Crew member break sim and calls emergency services if possible |
II/D |
I/D |
| HabCom Tiredness |
Lack of sleep, overexterd with activities |
3 |
2 |
Day before planned EVA, HabCom seets markers, reminders to prevent mistakes. Have set alerts for to go off during EVA |
III/B |
II/B |
| HabCom Unconsciosness |
Lack of sleep, medical condition, fall down stairs |
4 |
3 |
EVA team confirms comms by going to last point of signal. If no response, end EVA and alert emergency services |
II/D |
I/D |
| EVA Rover Breakdown |
Lack of battery charge, engine malfunction |
4 |
3 |
Make sure rovers are charged to 100%. Avoid driving in cold weather. Turn around as soon as Rover reaches 60%. If rover breaks down, communicate to CapCom and begin walking back to the Hab. |
III/C |
II/C |
| Loss of Comms Signal |
Geological obstruction |
5 |
4 |
Repeaters along driving routes would allow unblocked signal.Turn around if there is no contact for more than 2 minutes, go to place of last contact. |
IV/C |
III/C |
| Walkie Talkie dies |
Low battery charge |
4 |
3 |
All Walkie Talkies will be fully charged for EVA. Each crew must have atleast one extra Walkie Talkie. |
III/C |
II/C |
| Hab Fire |
Kitchen appliance, electrical spark |
4 |
3 |
HabCom does not cook or have kitchen appliances on during the EVA. Unnecesary lights should be turned off. |
II/D |
I/D |
| Fire in other building |
Electrical Spark |
4 |
3 |
HabCom occasionally looks out of windows to moniter other buildings. HabCom will not have music playing, which may block out a fire alarm |
II/D |
I/D |
Suggestions and ideas for MDRS and the Mars Society
- Have a project-based approach for crews, with a regular monitoring/feedback on the projects development during the mission (science/research reports).
- Have 1-2 weeks with the same CapCom to develop more relations and exchanges, so the CapCo is able to follow a crew and their project.
- Have more interactions between CapCom and the crew, e.g the CapCom could propose scenarios where the crew would have to get to an area of interest (add new parameters to the mission but should not be seen too much as a constraint).
- Remote science/innovation teams that could unify better the research done at MDRS, create a convenient database for building upon previous projects, advice new projects and ensure a continuity that will benefit the station development. Another point could be the development of the station, as it would happen on Mars once we get to the current architecture. We would need to explore more, settling relays for example, but also define maps (geological, radio, etc.). The innovation team could bridge the gap between individual projects and the station roadmap.
Lastly, they could also propose thesis projects to students that could benefit from the acquired data at MDRS (e.g human studies).
- For the development of the station, allocate different bricks/projects between groups such as national chapters or university groups (both collaborative and independent enough for not depending too much on others).
To contact us:
Dr. IllariaCinelli, i_cinelli@yahoo.it
Oakley Jennings-Fast, oakley.jenningsfast@gmail.com
Makiah Eustice, mckaynicole@tamu.edu
Dr. Jun Huang, junhuang@cug.edu.cn
Dr. Lindsay Rutter, lindsayannerutter@gmail.com
Andrew Foster, afoster2001@gmail.com
Antoine Bocquier, ant.bocquier@gmail.com























You must be logged in to post a comment.