Mars Desert Research Station
Mission Summary
Crew 187 – Team Latam II
Comandante/Astrónoma: Cynthia Yacel Fuertes Panizo (Perú)
Oficial Ejecutivo: Atila Kahlil Meszaros Henostroza (Perú)
Ingeniero de Tripulación: Luis José Antonio Díaz López (Perú)
Oficial del Invernadero: Hernán David Mateus Jiménez (Colombia)
Científico de tripulación/Oficial AEV: Oscar Ivan Ojeda Ramirez (Colombia)
Oficial de Seguridad y Salud: Danton Iván Bazaldua Morquecho (México)
Periodista: Tania Maria Robles Hernandez (México)

Declaración de la Comandante

Tuve el honor de trabajar con una tripulación de gran talento, no solo a nivel profesional, sino también en lo personal. Nuestras raíces provienen de Perú, Colombia y México; pero en nuestros corazones llevamos la responsabilidad de representar a toda Latinoamérica, lo cual siempre haremos con nuestro mejor esfuerzo. Cada miembro de la tripulación fue clave para poder culminar con éxito la misión; fueron valiosas sus experiencias, conocimientos en ciencias e ingeniería, su alto compromiso por hacer la simulación lo más real posible, su trabajo en equipo y apoyo constante; siguiendo siempre la filosofía de “¡Todos para uno y uno para todos!”.
Cada día en Marte fue una gran aventura; celebramos un cumpleaños marciano, recargamos un tanque de diésel, vimos el sol, la luna, las constelaciones, entre otras maravillas del universo, fuimos los primeros exploradores de un cañón, y tuvimos el honor que toda tripulación desea tener, otorgar el nombre a un cañón y a una carretera, es así que el cañón El Dorado y la carretera Despacito – porque se tiene que ir lentamente por esa ruta por seguridad de cada tripulante – son ahora parte del mapa del MDRS, El Dorado es una antigua leyenda sobre una ciudad llena de oro que desafiaba a todos los exploradores que se atrevían a buscarla. Para nosotros llamarlo así refleja la curiosidad que nos despertó como nuevos exploradores de Marte y el deseo de dejar allí una marca latinoamericana.
Me siento orgullosa de cada miembro de esta tripulación, ya que a su corta edad han logrado grandes cosas con ese coraje y fuerza que caracteriza a todo latino. No importa que tan grande sea el reto y los obstáculos que cada uno tenga que vencer, estoy segura que con esfuerzo, coraje y dedicación lograrán hacerlo; así como vencimos todos juntos las adversidades que tuvimos en nuestra estancia en el MDRS. En estos fabulosos 15 días, cada uno ganó experiencia, adquirió nuevos conocimientos, amplió su manera de ver el universo, y aprendió de los demás. Más que ser parte de una tripulación, nosotros pasamos a ser parte de una familia … ¡una familia marciana!
La tripulación 187 se encuentra eternamente agradecida por el apoyo y la confianza brindada por The Mars Society, Dr. Robert Zubrin, Dr. Shannon Ruppert, Mission Support y todas aquellas personas e instituciones que creyeron en cada uno de nosotros.
Ad Astra,
Cynthia Fuertes Panizo
Comandante de la tripulación 187 – MDRS
Resumen de Actividades Extra Vehiculares

Las Actividades Extra Vehiculares (AEV) en la exploración espacial no son rutina y, con seguridad, en las primeras etapas de la exploración de Marte, seguirá siendo así. Cada AEV es diferente a la otra, no solo porque los objetivos cambian, también porque las circunstancias cambian. Uno de los aspectos más importantes de la simulación en el MDRS es la posibilidad de simular estas actividades y experimentar las primeras afirmaciones de primera mano. Realizar AEVs es una gran oportunidad para aprender y probarnos de forma física y psicológica. Ser capaces de probar nuestra capacidad de reacción ante lo inesperado, solucionar problemas que surgen de la nada, lidiar con el estrés, y ser capaces de regresar a casa cada día, a una taza de chocolate caliente, y estar listos al día siguiente para pasar de nuevo por lo mismo.
La tripulación 187 realizó un total de 15 AEVs, sin contar las frecuentes excursiones de nuestro ingeniero al generador. La mayoría de los destinos fueron sugeridos por la Directora Shannon, llevándonos a zonas previamente inexploradas del área del MDRS. Algunas de las AEVs eran de rutina, para gastar las baterías de los vehículos eléctricos, para extender su vida, 4 AEVs de este tipo se realizaron. Las otras AEVs nos permitieron probar los proyectos de los tripulantes. Las pruebas en general fueron exitosas, logrando la mayoría de los objetivos científicos. De igual forma, pudimos explorar lugares que no habían sido visitados antes, o en un largo periodo de tiempo, por tripulaciones anteriores. La mayoría de actividades ocurrieron sin ningún problema, pero es importante mencionar el hallazgo de las huellas de puma, así como el drenaje de la bateria del rover Deimos, que llevó al equipo a encontrar soluciones para llevar el vehículo y a ellos mismos a casa.
Oscar Ojeda
Oficial de AEV
Resumen del Invernadero

Al final, el Greenhab quedó tan hermoso como el comienzo. Durante la misión tuvimos que hacer algunos cambios en el interior para dar más espacio a la acuaponia y cuidar las plantas que estaban frente al ventilador que habían sido dañadas. Después de estas modificaciones, recibimos una lona de alta resistencia para colocarla debajo del revestimiento y proteger las plantas que están expuestas a la radiación solar. Durante las dos semanas, se desarrollaron 3 proyectos en el Greenhab, lo que involucró un montaje de la acuaponia, germinación de diferentes tipos de quinua en dos tipos de suelo, uno análogo a Marte y otro comercial. Además, se trabajó en la medición de evapotranspiración de un cultivo de quinua en suelo análogo marciano, los datos que se obtuvieron van a ser analizados para dar recomendaciones para el Greenhab y el proceso de riego.
David Mateus
Oficial del Invernadero
Resumen de las Operaciones de Ingeniería

Durante nuestra estadía en la MDRS se realizó una recarga del tanque de diésel por un total de 300 galones, los cuales permitieron alimentar al generador eléctrico, encargado de proveer energía al Hábitat y a todas las estructuras de la estación. Cabe resaltar que debido al problema de control de nivel de agua encima de los dormitorios, fabricamos con éxito una alarma con sensor de nivel de agua para ser alertados en el preciso momento en el que debía cerrarse la llave.
Así mismo, basándonos en el problema suscitado con uno de los Rovers durante un EVA de larga duración, implementamos un protocolo de seguridad en el que, desde ahora, es obligatorio llevar un Kit de supervivencia (alimentos y herramientas), así como cuerdas gruesas que permitan remolcar un vehículo en caso de avería.
Luis Díaz
Ingeniero de la Tripulación
Informe final de los proyectos
Aplicación móvil como agente de ayuda en el MDRS
Cynthia Yacel Fuertes Panizo
Ingeniera de Sistemas. Universidad Nacional de Ingeniería, Lima – Perú
cynthiayfp@gmail.com
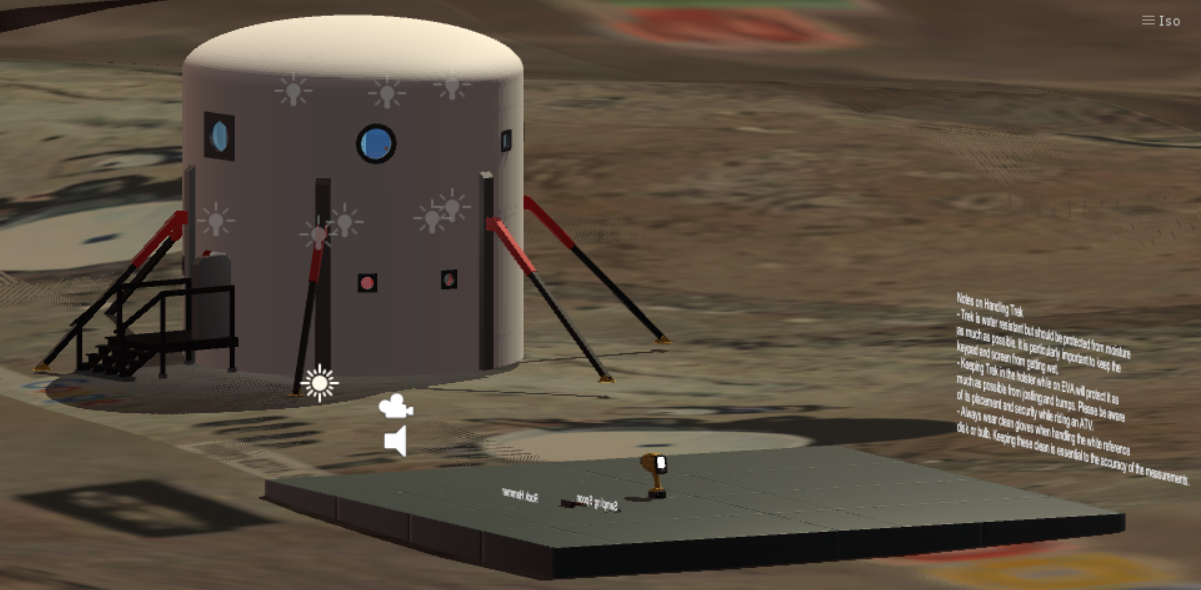
Según Gardner, Android es el sistema operativo con más usuarios en todo el mundo, por ello, las aplicaciones que desarrollaré serán para Android, utilizando los softwares Unity, Monodevelop, Vuforia, JDK y Android SDK.
Durante la simulación, trabajé haciendo una aplicación para el observatorio solar, la cual cuenta con 5 partes: instrucciones de seguridad, peligros potenciales, control de mano, alineación y enfoque. Al seleccionar la primera opción, se descargará un PDF con las Instrucciones de seguridad. En la segunda opción, se mostrará un mensaje emergente con el asesoramiento de los peligros potenciales. La tercera opción, permitirá reconocer el control manual del telescopio y superponer las partes principales del mismo y cuando se seleccione alguna se mostrará un breve concepto sobre cada una. Para el cuarto y quinto caso, se descargará un PDF para cada uno. Además, tengo la intención de trabajar con los equipos del laboratorio de ciencia, ya recolecté la información que necesito para ello. Además, tengo la intención de probar la aplicación final con tripulaciones futuras.

Divulgación de temas espaciales con una aplicación móvil
Cynthia Yacel Fuertes Panizo
Ingeniera de Sistemas. Universidad Nacional de Ingeniería, Lima – Perú
cynthiayfp@gmail.com
Durante la simulación, recolecté información que necesitaba, como imágenes, videos, mapeo 3D de algunas zonas que visitamos, del MDRS, etc. En Perú, comenzaré a crear la aplicación y planeo utilizarla en una escuela de un área vulnerable de Perú con el fin de difundir temas relacionados al espacio como lo es el MDRS, Marte, entre otras cosas.
Resistencia de cultivos peruanos a suelo análogo de Marte
Atila Meszaros
Universidad Peruana Cayetano Heredia, Lima – Perú
atilameszaros1@gmail.com
Se seleccionaron tres clases de quinua y una de kiwicha para demostrar su resistencia a la tierra análoga de Marte y para demostrar su valor para ser incluidas en las futuras dietas marcianas. Durante Sol 7, se plantaron tres réplicas y un control. Han sido regados una vez al día con 250 ml de agua. Hasta ahora, el control no ha germinado, y se espera los que están plantados en el suelo análogo de Marte, que comenzarán a germinar durante los próximos dos soles.
Compensaciones de acuaponia y comparación con métodos de jardinería regulares en MDRS
Atila Meszaros
Universidad Peruana Cayetano Heredia, Lima – Perú
atilameszaros1@gmail.com
Este proyecto se desarrollará durante los próximos meses y se llevará a cabo dentro del programa de pasantes, con el apoyo de los oficiales del invernadero de las siguientes tripulaciones para mantenerlo en funcionamiento. Inicialmente, solo se utilizarán las funciones hidropónicas y se realizará una comparación rentable entre el sistema hidropónico y las técnicas de jardinería habituales. Durante esta rotación, el sistema de acuaponia está casi completamente configurado y vamos a comenzar a hacer pronto las pruebas de fugas.
Diseño e implementación de un sistema termorregulador para la homologación de la temperatura interna en los trajes de EVA usados por los astronautas análogos en la MDRS
Luis José Antonio Díaz López (Cascas, Perú)
Ingeniero Mecatrónico de la Universidad Nacional de Trujillo, Perú
luisjosedl14@gmail.com
La implementación y las pruebas del proyecto fueron exitosas. Debido al frío, solo se probó el sistema de calefacción, que utiliza una resistencia de cerámica comúnmente utilizada en extrusoras de impresoras 3D. Esta resistencia es parte del sistema de intercambiador de calor que transmite, por convección, el calor al agua. Una bomba de agua es responsable de hacer circular el líquido termorregulado dentro de una bolsa para la donación de sangre, que se regula gracias a un diferencial de temperatura que toma como referencia la temperatura externa y la temperatura dentro del traje (específicamente en el área donde se encuentra el corazón). Del mismo modo, la lectura de temperatura se almacena en una memoria microSD junto a la fecha y hora para tener una referencia cronológica de las compensaciones de temperatura que el sistema tuvo que realizar.

Evapotranspiración en Marte
Hernán David Mateus Jiménez
Ingeniero Mecatrónico, estudiante de maestría en ciencias en ingeniería de sistemas. Universidad Nacional de Colombia, Bogotá Colombia
hdmateusj@unal.edu.co
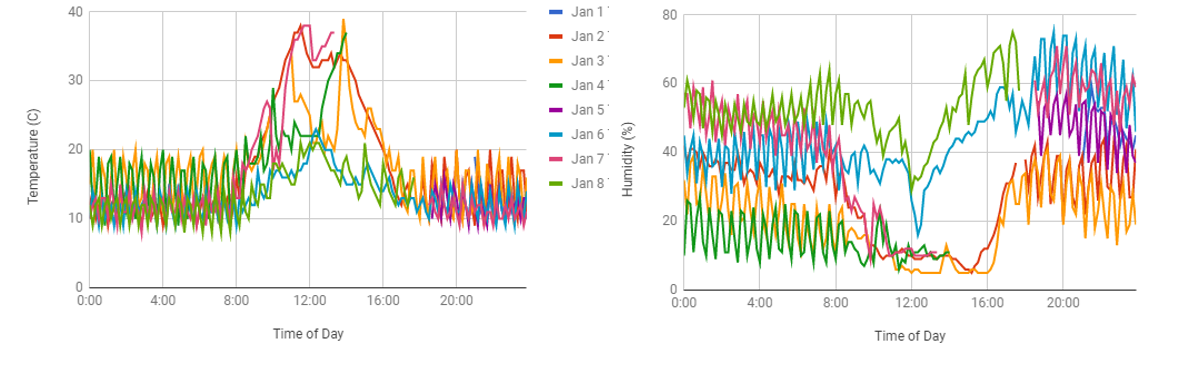
La evapotranspiración es el proceso físico que convierte el agua líquida de un área verde en agua de vapor por la acción de la transpiración y la evaporación. Una forma de medir la evapotranspiración es usar un dispositivo llamado lisímetro que mide el peso del cultivo y el peso del lixiviado de forma continua.
El lisímetro comenzó a ensamblarse desde el comienzo de la simulación, pero comenzó a tomar medidas de evapotranspiración en Sol 8, debido a que algunas piezas debían repararse y era necesario hacer un EVA para tomar el suelo marciano. Además, era necesario determinar la cantidad de agua para mezclar con el suelo marciano y obtener la mejor textura. Los datos recolectados durante los seis Soles se analizarán en Colombia para obtener una lista de recomendaciones para mejorar el uso del agua en el invernadero y en los cultivos que usan suelo marciano.

Sistema de posicionamiento basado en el reconocimiento de estrellas
Hernán David Mateus Jiménez
Ingeniero Mecatrónico, estudiante de maestría en ciencias en ingeniería de sistemas. Universidad Nacional de Colombia, Bogotá Colombia
hdmateusj@unal.edu.co
En este proyecto, queríamos probar un software que diga cuál es su ubicación, en función de una fotografía que saque del cielo. Este software fue desarrollado en Python usando la librería Opencv. El objetivo era medir la precisión del software para desarrollar en el futuro sistemas de posicionamiento útiles para los EVA nocturnos.
Durante la simulación pudimos tomar la cantidad suficiente de fotos para construir un mapa celeste donde el descriptor SIFT buscará las similitudes con una foto tomada para encontrar su posición.
Evaluación de campo del simulador de traje espacial Cóndor
Oscar I. Ojeda
Universidad Nacional de Colombia
oscar6ojeda@gmail.com
El proyecto tuvo como objetivo evaluar el rendimiento del simulador de traje espacial Cóndor, así como sus sistemas independientes. Las actividades consistieron en participar de las AEV con el traje en diferentes configuraciones, las AEV se clasificaron en corto, mediano y largo alcance. Los sistemas probados fueron la colocación completa y la parte flexible combinada con el traje Exo, disponible en MDRS. las AEV consistieron en actividades técnicas, biológicas y geológicas, así como movilidad básica y manipulación de vehículos. Se hicieron varias observaciones sobre mejoras y se implementarán para la próxima versión de la demanda. En general, los resultados fueron positivos, con un alto rango de movimiento, combinado con suficiente restricción, para simular adecuadamente un traje espacial.

Prueba de una rueda basada en PXCM para un rover planetario
Oscar I. Ojeda
Universidad Nacional de Colombia
oscar6ojeda@gmail.com
El objetivo del proyecto era realizar una prueba de campo básica de una rueda impresa en 3D, destinada a un vehículo de superficie planetario. La prueba hizo uso de un rover automatizado simple, que se implementó en MDRS. La rueda fue impresa por ITAMCO y diseñada en la Universidad de Purdue. Las ruedas fueron recibidas en la estación y ensambladas. En primer lugar, se observó el rendimiento del rover con las ruedas comerciales tradicionales, atravesando diferentes tipos de terreno, que es un análogo para Marte. Posteriormente, las ruedas se instalaron en el rover y se volvieron a probar en terreno analógico. Los resultados observados mostraron un rendimiento equivalente al asumir el terreno. Se sugieren más pruebas de laboratorio y de campo para caracterizar completamente el rendimiento de las ruedas, sin embargo, las primeras pruebas arrojaron resultados positivos.
Detección remota en superficie análoga a Marte
Danton Bazaldua1 Walter Calles2
1UNAM, México 2IPN, México
danton.bazaldua@spacegeneration.org1, walterabdias@gmail.com2
La DRONE DJI SPARK mapeó 5 km de superficie alrededor de MDRS para analizar con cámaras y procesamiento digital para 3D en suelo marciano. Este dron mapeó el suelo del MDRS y el hábitat durante 5 EVA durante dos semanas, lo que ayudará a tomar imágenes a 40 metros de altura para analizarlas posteriormente mediante un procesamiento digital en 3D que nos ayudará a comprender mejor las características del planeta. Además de seguir en superficie con piloto automático el camino de los astronautas en cada expedición luego de que el Dron analice las características de la superficie del MDRS así como el tipo de suelo y sus características básicas utilizando Matlab y Pix4D para analizar las imágenes del Hábitat tomado por el dron.
Detección remota de señales vitales
Danton Bazaldua1 Walter Calles2
1UNAM, MEXICO 2IPN, MÉXICO
danton.bazaldua@spacegeneration.org1, walterabdias@gmail.com2
Objetivo: Este dispositivo fue un monitor E.C.G así como algunos aspectos importantes como la presión y la humedad interna del traje espacial de MDRS CREW 187, a través de un sistema de monitoreo enfocado a las Actividades Extra Vehiculares (EVA). Módulo E.C.G además de la posición del cuerpo, piel de respuesta galvánica que transmitirá los datos a la interfaz de usuario en la que se presentan en tiempo real a los astronautas en un reloj inteligente o una interfaz de PC. Sin embargo, el monitor tiene un problema con la conectividad y fue complicado de usar durante EVA, pero se usó para monitorear antes de la expedición de EVA. Los datos médicos han sido útiles para HSO durante la misión de mantener el Crew 187 y diseñar protocolos para elegir al miembro de cada expedición.
Dinámica de funciones cognitivas en una simulación análoga marciana
Betel Martínez Valdés1, José Eduardo Reynoso Cruz1 y José Luis Baroja Manzano1
1Universidad Nacional Autónoma de México, Departamento de Psicología,
Ciudad de México
betelmarvall@gmail.com
Durante las dos semanas se monitorearon diferentes niveles de fatiga de habilidades cognitivas en miembros de Crew 187 y se comparó con el grupo control de participantes externos no relacionados con la simulación analógica.
Catorce adultos fueron parte del estudio. Los grupos fueron emparejados por sexo, edad, dominio lateral y nivel de estudios. Los sujetos del grupo de apoyo y el emparejamiento de control se elegirán voluntariamente.
.
Dinámica de cooperación en una simulación analógica marciana
Betel Martínez Valdés1, Oscar San Pedro Caligua1
1Universidad Nacional Autónoma de México, Ciudad de México
betelmarvall@gmail.com
Durante este experimento analizamos la dinámica de la cooperación y el equipo de trabajo. Reciprocidad entre los miembros de la tripulación 187. El comportamiento cooperativo entre los miembros de la tripulación durante la simulación analógica a Marte fue aplicar un dilema social de riesgo colectivo en el que seis astronautas serán jugadores y un coordinador. Esta tarea se aplicará cinco veces en dos semanas, esta información ayudará a analizar el estado de la cooperación durante una misión analógica.
Comunicación científica y documental para proyectos espaciales de jóvenes científicos y profesionales en América Latina
Tania Robles
Universidad Nacional Autónoma de México, Ciudad de México
taniarblsh@gmail.com
América Latina es una región emergente y en crecimiento en el sector aeroespacial. Debido a su capacidad para ofrecer servicios de desarrollo y fabricación a bajo costo, ha sido aceptado como una de las regiones proveedoras de las compañías y agencias espaciales más importantes.
A pesar de esto, América Latina es un área que no ha desarrollado su infraestructura y capacidades de recursos humanos en el sector. Algunas de las causas pueden ser la ignorancia de los que toman las decisiones. Para este propósito, se ha creado un proyecto de divulgación sobre el trabajo de jóvenes mexicanos y extranjeros en el campo espacial, así como la importancia de estos temas.
El proyecto consiste en la documentación de los problemas y las acciones de los jóvenes estudiantes para resolver problemas de la academia y la industria.







































You must be logged in to post a comment.