

Martian Biology IV (MDRS Crew 298) Final Report
From June 3-10 2024, the fourth iteration of the Martian Biology program documented the animals, plants, and environment of the Mars Desert Research Station (MDRS) operational area while analysing the history and practice of Martian analog research, continuing a series of missions started in 2019. This program is a Mars Society-sponsored non-simulation effort to better understand the ecology of this unique desert region, and has expanded from a focus on the immediate vicinity of MDRS to include various sites across Wayne, Emery, and Garfield counties.
This year the crew consisted of Shannon Rupert (Director Emeritus of the Mars Desert Research Station), Samantha McBeth (field biologist and naturalist), Jordan Bimm (Space Historian and Professor of Science Communication at the University of Chicago), Jacopo Razzauti (PhD Candidate at The Rockefeller University), Olivia Drayson (PhD Candidate at University of California Irvine), and Paul Sokoloff (Botanist at the Canadian Museum of Nature). In all these endeavours we were supported by the Director of MDRS and honorary seventh crew member, Sergii Iakymov.
Our primary objective was to carry out five scientific projects, which are linked under our overall program objective to understand the ecology of the Mars Desert Research Station and its surrounding area – a unique desert ecosystem set in between well studied National Parks and Recreation Areas on Ute and Paiute Lands. These projects included an observational study of vertebrate fauna using wildlife cameras and traces, a study of invertebrate fauna with a focus on insects, investigations on the practice of astrobiology and field science at Mars analog sites, sampling for analysis of water-borne microplastics, and a collections-based inventory of the area’s vascular plant biodiversity. These various studies took place at 12 sites in southeast Utah, ranging from locales near the station to sites in the San Rafael Swell and the Henry Mountains.
The data and materials collected from this rotation will be used to support multiple planned peer-reviewed articles, including a ecological community analysis, an annotated checklist of vascular plant diversity, a paper on the natural history uncovered through vertebrate scats, tracks, and camera observations, a historical analysis of lichens in space science, a publication on water-borne microplastics at Mars analogs, and a correlation of water availability by biological diversity in the station area.
Looking forward, our team is planning on continuing our natural history surveys of the MDRS area, conducting vegetation ecology studies near the station, continuing historical research and field-based exploration on Mars analogs from a social science perspective, and connecting with local experts (such as Erin Riggs, curator of the Utah Valley University Herbarium, who visited us during this rotation) to better understand the desert and give back to local communities.

Vertebrate Zoology – Samantha McBeth
To complement opportunistic sightings of larger wildlife who call the area around MDRS home, formal protocols were introduced to the continuing ecological field work of previous missions. While the desert might seem arid and inhospitable, many mammals, birds and reptiles have left their marks on the sand, stones and streams. 5 wildlife camera traps were installed in areas of high animal traffic, near sources of water. Camera traps are stationary cameras that are triggered automatically when an animal moves into range of the motion sensor. This is the most effective technique for photographing elusive and nocturnal wildlife.
All 12 sites were surveyed for signs of wildlife. Tracks, scat, burrows and scuffs were measured and photographed, later ID’ed using references. Audio recordings of bird song were collected, and visual bird surveys conducted to get a snapshot in time of bird activity at the site. At first glance, dozens of wildlife species are present near MDRS in June, notably ravens, red-tailed hawks, swallows, horned lark, desert spiny lizards, red-spotted toads, pronghorn, mule deer, coyotes, bobcats, black-tailed jackrabbits, white-tailed antelope squirrel, Ord’s kangaroo-rats, woodrats, canyon bats, black-chinned hummingbirds, rock wrens, flycatchers, skunks, rock squirrels, prairies rattlesnakes, nightjars and great-horned owls. More species will be identified once analysis of camera data, sign collection and audio recordings is completed.
Data collection was successful. Camera traps directly at sources of water have proven the most efficient at capturing photos that allow clear identification of species, as permanent water features in landscapes tend to concentrate local wildlife into a single location. The highest quantity of information on species biodiversity was provided by tracks and scats, as desert landscapes are ideal at preserving such information long after an animal has passed through. Particularly challenging was finding BLM land that was not overtly damaged by cattle.
Moving forward, the presence and absence of wildlife species will be narrowed down to more specific locations, augmented with citizen science and may even have causality with other taxa of life forms such as vascular plants and insects found around MDRS.

Invertebrate Zoology – Jacopo Razzauti
Resuming the approach adopted in the previous two missions, the investigation of local entomofauna was conducted at each site visited. Both telescopic sweep nets and barrel pooter were used for the collection of both aquatic and terrestrial invertebrates, with a particular emphasis on mosquitoes at various life stages (e.g. larvae, pupae and adult). No oviposition traps were used this year. The collected specimens were then brought back to the science dome at the Station for further analysis and classification. Where possible, specimens collected at the larval stage were kept until completion of metamorphic cycle to aid with identification.
Over 40 specimens of mosquitoes reached or were collected at adult stage. All of these were collected at sites where non-ephemeral, mostly stagnant water was found. Interestingly, larvae of Culiseta incidens were collected in large numbers in the exact same large metal water troughs as last year, at the McMillan Spring campsite on the Henry Mountains. This indicate a high degree of sympatry for this species in this area. Adults Culex pipiens, the common house mosquito, were collected at the Fremont river site near Hanksville but not at other sites located further from human. This reflects the strong adaptation to a more domestic ecology of this species, specialized on blood-feeding on humans, compared to the other species found in the area around the station. The remaining fraction of the adult mosquitoes was mostly collected at Coal Mine Wash and awaits identification.
In addition to mosquitoes, other insects were collected at the various sites using a similar approach. Various nymphs of Ephemeroptera were collected at Hog Springs and raised in the science dome. Collection of black flies larvae (family: Simuliidae) under rocks in the flowing water of the San Rafael river at the Salt Wash site was successful this year. Comparing this with the outcome of collection of the same target in the past two years it is clear that there is an inverse correlation between the amount of larvae collected and the river discharge. Indeed, when the gage height and discharge are low (like this year and during our first mission in 2022).
Outside of the class Insecta, a large scorpion was found at the station (see photo, credits: Samantha McBeth). This finding highlights the importance of focusing on other arthropods outside of insect in future missions, such as arachnids and crustaceans inhabiting the region.

Astrobiology in Action – Jordan Bimm
My historical and sociological work is animated by two central questions. What is the history and culture of Mars analog research? And, how can historical knowledge of astrobiology and extreme field sciences benefit from and inform Mars analog research, including biodiversity surveys around MDRS? My work at the station draws upon extensive archival research in the history of space exploration, space medicine, and astrobiology. At MDRS I employ established methods from history of science and sociology of science including informal oral history interviews and participant observation. Informal oral history interviews involve engaging in conversations with researchers to access their personal stories, understandings, and remembrances of significant events. Participant observation involves assisting scientists in their work as a way of gaining first-hand knowledge and experience of scientific culture and practices. Together these methods include gathering stories about the history and everyday operations of MDRS as well as contributing to the team’s biodiversity survey in the role of a field research assistant.
A major focus has been on the natural history and biology of lichens. Commander Paul Sokoloff is a lichen expert and has been my primary interlocutor on this topic. Few realize that unassuming yet resilient lichens are significant for space history, the history of astrobiology, and the cultural history of Mars in particular. Between the 1930s and 1965 the scientific consensus about the possibility of life on Mars is that it did exist but mainly took the form of lichens. Today few remember this intermediate moment between American astronomer Pervical Lowell’s fin de siecle belief in an intelligent civilization and our much more modest post-1965 hopes for detecting some evidence of (likely past) microbial life. Fieldwork at MDRS focused on surveying local lichen biodiversity contributes to the history of this missing chapter in the history of astrobiology, ideas about life on Mars, and early life detection techniques focused on lichens. During this time between Lowell and NASA’s Mariner 4, Mars was referred to as “The Green and Red Planet.” This work aims to furnish an environmental and scientific history of this mid-century “green Mars” which animated planetary exploration at the dawn of the Space Age.
In addition to gathering data for Astrobiology in Action and assisting the crew in their fieldwork, I also served as Crew Journalist, crafting compelling science narratives based on each day’s activities, challenges, and findings to interest a wide popular readership. I look forward to continuing this important work in future missions under the Martian Biology program at MDRS.

Water Microplastic Analysis – Olivia Drayson
Plastics are now infiltrating everywhere on Earth. The ~350 million tonnes of plastic waste produced each year will break down into microscopic pieces, ranging in size from 1 micrometer to 2.5 millimeters. These pieces are small enough to be brought up into the atmosphere, and are now being deposited by wind and rain in even the most remote parts of the planet. This includes snow, sea ice and sediment in the Arctic, fresh snow in the Antarctic, and even air and water in protected lands in the US.
In 2023, as part of the science directorate of FMARS15 – the analogue astronaut mission to the Flashline Mars Arctic Research Station in Nunavut, Canada – samples from creek, snow, lake, river, sea ice and ocean water were collected to look for microplastics. As part of this investigation, water samples were also collected by Crew 298 from sources surrounding MDRS. The samples were collected from both moving water at South Creek, Salty Creek, Salt Mine Creek and the Fremont River, and still water in pools at Coal Mine Wash, Cowboy Corner and Hog Springs.
These samples will be transported to the lab for analysis. First a fine filter is used to isolate the particles, then an acid or an alkali is used to “digest” any organic material. After removal of all organic matter, a red dye is applied that binds to plastic and fluoresces under blue light. After visual inspection, if plastics are found they will be characterised using infrared spectroscopy, this can help determine the likely source of the plastic particles.
The challenge with conducting microplastic detection is avoiding contamination with plastic collection products. As soon as you start to look around, you’ll find plastics in almost every consumer product, from the linings of soda cans to the lids of glass tupperware. Therefore care has to be taken to use containers made from non-plastic materials. For this study, glass mason jars with metal lids were used to avoid this problem.
If microplastics are detected, future expeditions can build on this study to collect larger volume samples from more collection sites, and also collect sediment and soil samples. Given that microplastics have already been detected in locations within Utah, it is very likely that the water sources around MDRS are no different. It is sad to think that perhaps humanity has already contaminated the moon and mars with plastic.

Botany – Paul Sokoloff
Collections-based research continues to be the best way to understand the flora of a given area, as the preserved specimens provide durable proof that a given species was found growing at a specific place and time. Flattened in a plant press and set out in the desert heat until dry, these two dimensional plant specimens will be deposited at the National Herbarium of Canada (CAN) at the Canadian Museum of Nature in Ottawa, Ontario, Canada, and at the Utah Valley University Herbarium (UVSC) in Orem, Utah, USA. Paired with labels containing data including the species name, location, date, and habitat information, these sheets will be useful to botanists for decades and centuries to come.
Crew 298 collected 80 vascular plant specimens from the 12 locations we surveyed. This included both recollections of taxa previously documented for the MDRS area (which are useful for documenting the continued existence of a population or fluctuations within a species through time), and species newly encountered by our team within the study region. These specimens will be sent to the Ottawa via colleagues at Eastern Washington University, where they will be identified using a variety of literature sources, including A Utah Flora, Flora of North America North of Mexico, The Desert Plants of Utah, and other primary literature sources. Additionally, each specimen collected was subsampled for high-quality DNA preservation – leaf tissue from each collecting event was dried in silica gel and will be stored at cryogenic temperatures in the National Biodiversity Cryobank of Canada, where they will be available for future genomics projects.
Some of these 80 specimens, such as the Green-Stem Paperflower (Psilostrophe sparsiflora) and Palmer’s Penstemon (Penstemon palmeri) were encountered in locations previously botanized by the Martian Biology Team. Others, like Cliffrose (Purshia mexicana) and Single-leaf Ash (Fraxinus anomala) were found in areas newly examined by our team. Though the pace of new species encounters is slowing as the program is in its fourth year of botanizing the station’s operational area, these new taxa hold promise of further species detection with additional work.
In the immediate future we plan on writing an annotated checklist of the vascular plants collected in 2022, 2023, 2024. Altogether, these 284 specimens include a minimum of 32 taxa occurring within the station area not yet covered by one of our “Martian Floras”. Moving forward, we are planning on using these updated checklists to support vegetation ecology work at the station.

Ecology – Shannon Rupert
So how do all these disparate things—mosquitos, plants, animals, microplastics, astrobiology and Mars—come together to inform science? What we learn from them, the patterns we see in their lives alone and with each other, in a place where the geology is a true analog for what we see on Mars, gives us the opportunity to learn how to explore and recognize life on Mars. These patterns give us a spatial explanation for how life organizes itself, and what it needs to develop from individual species into a biodiverse ecosystem.
These early studies will, in future years, be combined into a larger dataset that we can analyze using multivariate community analyses to develop a model of how we might recognize a biological landscape as small as a biofilm or as large as a planet. And as a bonus, it adds to the information about landscapes here on Earth that are constantly changing in reaction to things like climate change and human interactions.

The Martian Biology 2024 Team. From left to right: Jacopo Razzauti, Sergii Iakymov, Shannon Rupert, Samantha McBeth, Jordan Bimm, Olivia Drayson, and Paul Sokoloff.

























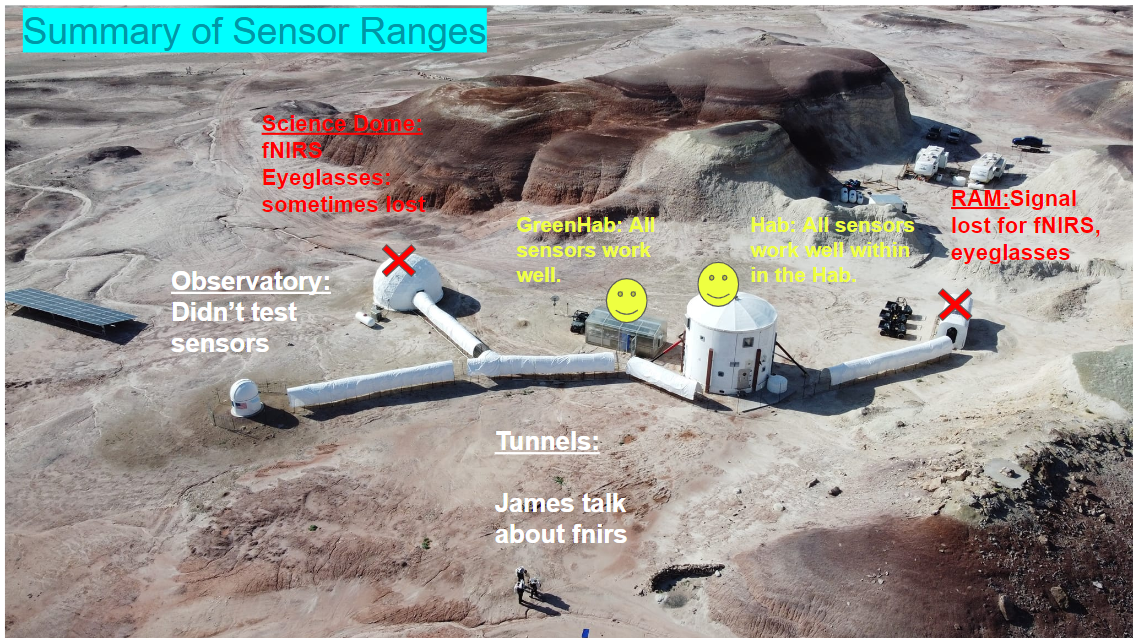 Figure 1: Summary of range studies, where we were able to collect eyetracking, biopac, and fNIRS data, and where we had challenges of signal drop.
Figure 1: Summary of range studies, where we were able to collect eyetracking, biopac, and fNIRS data, and where we had challenges of signal drop.



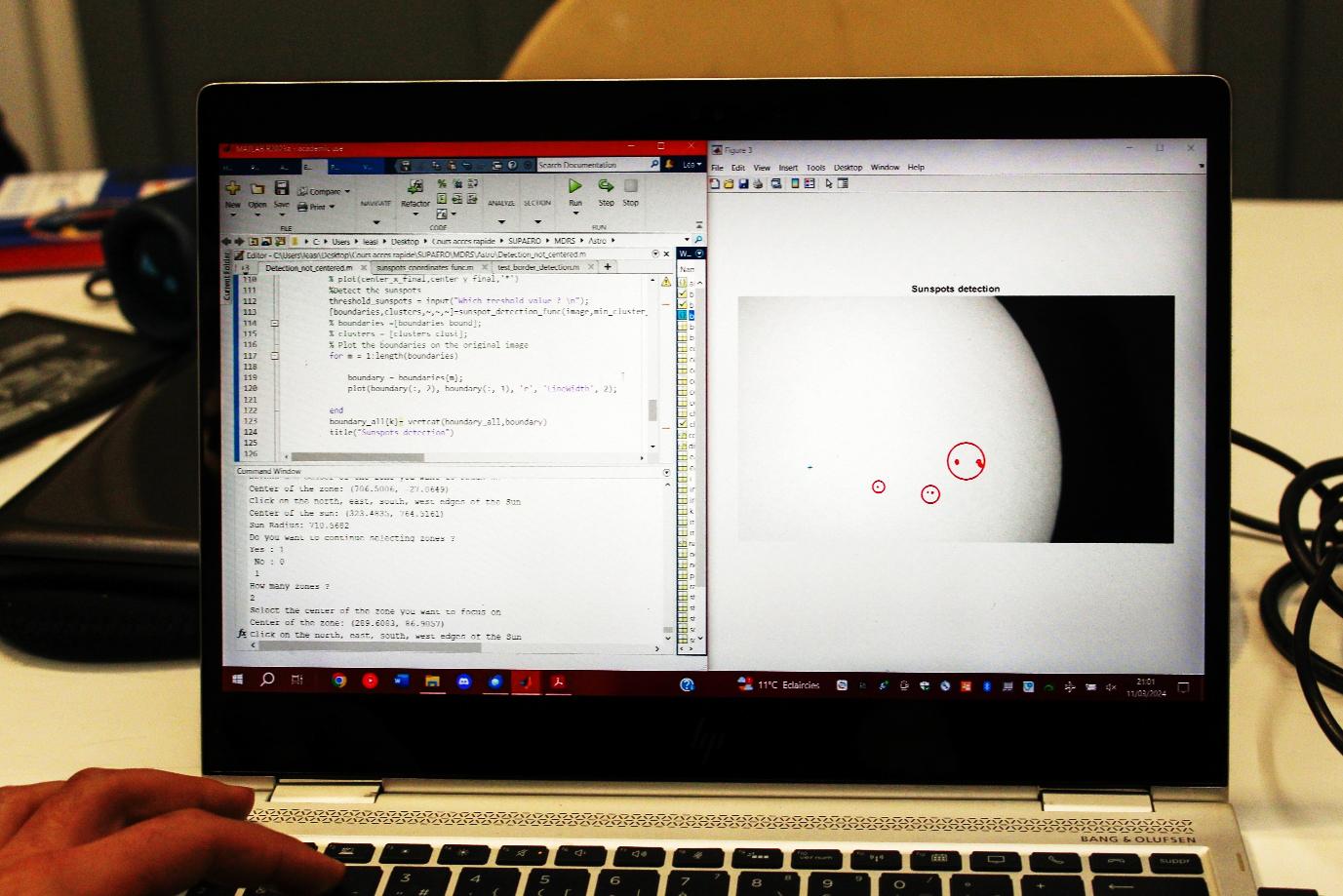 The Crew Astronomer’s research project was to estimate the speed of sunspots, factoring in the Sun’s rotation. Unfortunately, for the first half of the rotation, the Musk Observatory was not usable. They decided to use the robotic observatory to learn astrophotography. As the MDRS’ robotic observatory was offline, they used the RCOS-16 remotely. At mid-rotation, the Musk Observatory was available and they started to learn how to handle it. They had to deal with issues with the observatory dome, requiring a great deal of troubleshooting. Pictures of sunspots and solar prominences were taken during 6 Sols, then the Crew Astronomer was unable to continue because of cloudy conditions. They worked on improving their MATLAB code to make the necessary calculations from the sunspot pictures; they will actively continue to pursue their project after the end of the rotation.
The Crew Astronomer’s research project was to estimate the speed of sunspots, factoring in the Sun’s rotation. Unfortunately, for the first half of the rotation, the Musk Observatory was not usable. They decided to use the robotic observatory to learn astrophotography. As the MDRS’ robotic observatory was offline, they used the RCOS-16 remotely. At mid-rotation, the Musk Observatory was available and they started to learn how to handle it. They had to deal with issues with the observatory dome, requiring a great deal of troubleshooting. Pictures of sunspots and solar prominences were taken during 6 Sols, then the Crew Astronomer was unable to continue because of cloudy conditions. They worked on improving their MATLAB code to make the necessary calculations from the sunspot pictures; they will actively continue to pursue their project after the end of the rotation.
 Every morning, we also measured health parameters to keep an eye on the physical and mental health of the crew. To this end, we kept a sleep diary, and monitored weight and body composition, temperature, as well as blood pressure and oxygenation. These “core data sets” will be shared with the Human Factors research teams.
Every morning, we also measured health parameters to keep an eye on the physical and mental health of the crew. To this end, we kept a sleep diary, and monitored weight and body composition, temperature, as well as blood pressure and oxygenation. These “core data sets” will be shared with the Human Factors research teams.













You must be logged in to post a comment.