End of Mission Research Report
Transatlantic Mars Crew 261
May 12, 2023
JAMES BURK | Commander
ALINE DECADI | Executive Officer + Crew Astronomer
CÉCILE RENAUD | Greenhab Officer + Crew Biologist
JULIEN VILLA-MASSONE | Crew Engineer
ERIN KENNEDY | Crew Robotics Engineer
AUDREY DEROBERTMASURE | HSO & Medical Officer
KRIS DAVIDSON | Crew Journalist
Mission Overview
Crew 261 began planning our experiments in 2019 when we conducted a call for ideas from the worldwide Mars analog research community. Commander James Burk and XO Aline Decadi worked in partnership with our crewmembers and researchers from across the world to select these experiments that would cover many scientific and technical disciplines. Over the three years we spent planning the mission, the roster of experiments shifted but many have been planned for that entire duration. Two crewmembers (Crew Roboticist Erin Kennedy and HSO Audrey Derobertmasure) originally started out as experiment PIs but were added to the crew due to other vacancies and circumstances that came up during the multi-year planning process.
We believe that our final suite of experiments can help towards solving some of the challenges faced by future Mars astronauts, while also advancing technology and research for long-term human presence on Mars. Some of the work that our crew is conducting during our mission will also directly support the overall Mars Desert Research Station program and the Mars Society’s worldwide analog research efforts.
COSMOS – Cardiovascular Monitoring & Pharmacology on Mars
(Audrey Derobertmasure, HSO)
Test a new approach to pharmacological studies with the aim of optimizing, adapting and individualizing drug treatments.
Our aim this week was to evaluate the impact of extreme environments and confinement on markers of early vascular aging. To do so, we utilized the pOpmetre, blood pressure monitor, and connected scale body cardio from Withings to monitor cardiovascular parameters and metabolic composition. Early vascular ageing refers to an increase in the thickness and stiffness of the aortic wall, which is associated with systolic hypertension, diabetes, and cardiovascular diseases. Arterial stiffness can be easily detected by measuring pulse wave velocity (PWV). The pulse wave corresponds to the transfer of energy along the walls of the arteries at a speed of around 5-10 m/s. This pressure wave is reflected at the reflection sites and returns to the heart, creating a reflection wave that can add to the incident wave more or less early during systole depending on arterial stiffness, anatomy of the arterial tree, cardiac output, and other parameters. The stiffer the arteries, the higher the pulse wave velocity. This allows for the assessment of cardiovascular health status. A high pulse wave velocity can lead to an increase in systolic blood pressure and hypertension, while a decrease in pulse wave velocity leads to an improvement in cardiovascular health.
We measured the PWV between the finger and toe using the pOpmeter device equipped with two photodiode sensors placed on the finger and toe, respectively. The pOpmetre measures the transit time of the pulse wave from the heart to the toe and finger, as well as the difference in arrival time of the finger-toe pulse wave. The distance traveled is estimated based on the patient’s height. This measurement only took 12 seconds (image 1).
We assessed the blood pressure and PWV of six crewmembers every morning, supervised by two crewmembers previously trained by the INSERM U970 team, Audrey Derobertmasure (HSO and PI), and Aline Decadi (XO) (images 2 and 3). Measurements were also taken after the EVA to assess its impact on cardiovascular parameters. This protocol was carried out throughout the entire mission, with an additional PWV measurement on sol 10 in the evening to have a nycthemeral measurement.
This device was found to be very practical with the busy schedule of the mission. The entire set of measurements (average of 3 blood pressure and 3 PWV velocity measurements) only took 5 to 10 minutes per person. We were sometimes unable to measure the PWV of crewmembers who presented Raynaud syndrome (i.e., cold extremities) even after being warmed up.
Additionally, each team member weighed themselves every morning on the connected scale, which analyzed their body composition (fat, muscle, bone and water mass mass, calculated their BMI, and measured vascular age (image 4). The scale uses the principle of bio-impedance analysis. Bio-impedance is a measure of the electrical resistance of body tissues. A small electric current is sent through the body, and the electrical resistance is measured in return. The measurement of PWV by the connected scale uses the principle of impedance plethysmography combined with ballistocardiography, meaning that the ejection of blood into the aorta exerts a force that leads to variations in weight, which are measured by the scale.
In conclusion, we have obtained a complete set of data for result analysis to provide to the INSERM team researchers.
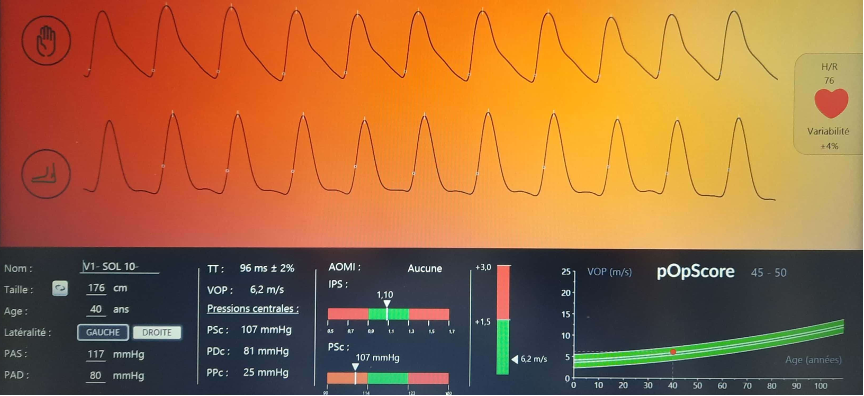
Image 1. Main window displaying all the necessary information for arterial stiffness measurement. Central strip: sensor quality signal indicators; in the middle, the pulse wave signal graph; on the right, calculated results of H/R and pulse wave variability. Lower strip: clinical data of the crewmember (height, age, blood pressure), measurement results (PWV or VOP in French), and PWV graph based on age.

Image 2. Analyzing arterial stiffness using the medical device pOpmetre by HSO Derobertmasure on Crew Engineer Julian Villa-Massone

Image 3. Measurement of blood pressure using the connected Withings blood pressure monitor on XO Decad


Image 4. Measurement of body composition using the connected scale Withings on a crew member: Fat and muscle mass
The knowledge of space pharmacology, which refers to the fate of drugs in humans in space, is very limited. However, drug treatments are necessary for long-duration space missions, particularly preventive medications targeting early vascular aging. Physiological modifications are likely to affect pharmacokinetics and pharmacodynamics (PK/PD). Moreover, constraints associated with the transposition of PK studies from Earth to space make it difficult to interpret drug response in space and Martian conditions.
We propose an alternative sampling method, the use of dry matrices, namely dried blood spot (DBS) and dried urine spot (DUS). This involves placing a drop of capillary blood from the fingertip on blotting paper obtained after a finger prick with a lancet or urine with a small pipette. The advantages are as follows: easily transportable and low-cost sampling, minimally invasive, ideal for repeated measurements. The study conducted on sol 7 and sol 8 is a preliminary study of drug metabolism in spaceflight conditions, including self-sampling in analogous conditions. We evaluated the feasibility of this DBS and DUS sampling method for detecting caffeine after oral administration. Why caffeine? Caffeine is a substance widely used and found in many beverages and foods (coffee, tea, and chocolate), and its metabolism is well-described. Specifically, six crew members self-collected blood and urine samples before and at different times after caffeine intake to determine caffeine exposure, i.e., its elimination. During these two days, we managed to perform all the expected caffeine pharmacokinetics. Sol 7, a rest day, was perfectly dedicated to the sampling. Our crew commander Burk, did his sampling on sol 8 and managed to complete an EVA mission while respecting the sampling time.
The next step is to analyze the DBS and DUS samples in the laboratory in France, at AP-HP.


Image 1: Dried Blood spot sampling Image 2: Dried urine spot sampling
BIOSTIMULATION – GreenHab Spirulina Experiment (Cecile Renaud, GreenHab Officer and Crew Biologist, as part of MELiSSA Program, UMONS)
Use of Spirulina to improve plant germination and growth.
Two experiments have been conducted on biostimulation using Spirulina. First, spirulina is used to improve the germination and early growth of tomato seeds. This experiment has been conducted in the Science Dome using the grown tent. Tomato seeds have been sown in 3 kinds of soil: regular commercial gardening soil, collected soil from Utah desert (Kissing Camel Ridge E), and Mojave Mars Simulant 1 (MMS-1) from the Martian garden. The soil from Utah comes from 3 different places and presents 3 drastically different characteristics.
Table 1. Utah Soil sampling
|
Soil Sample
|
UTM coordinates
|
Characteristics
|
|
1
|
0518543 4249696
|
Sandy White Soil
|
|
2
|
0518448 4249653
|
Volcanic dark brown/red Soil
|
|
3
|
0518396 4249684
|
Old river plant soil with growing plant close by
|
8 tomato seeds are sown in each soil and watered with different biostimulation solutions, water only as negative control and compost solution as positive control. Plants are grown for 10 days.
Second experiment was focused on the health and growth improvement of tomato plants. Tomato plants are grown in the GreenHab of the MDRS and watered using the same solutions as described before. Biostimulation is started at SOL 3 until SOL 9. Leaves have been collected for further biochemical analysis.
ALGACRAFT – Photobioreactor
(Cecile Renaud, GreenHab officer and Crew Biologist)
Test growing spirulina as a component of a future closed loop life support system.
Crew Biologist Cécile Renaud and Crew Engineer Julien Villa-Massone set up the Algacraft Photobioreactor on SOL 2.
Crew Biologist has been in charge of the scientific part of this experiment. This includes maintaining the Spirulina culture including preparing the culture media, filling the photobioreactor, harvesting the Spirulina, measuring dried biomass production.
Crew Engineer has been responsible for the software part of this experiment. This involved writing the computer code in python to operate the device prior to the mission and adjusting the code while on site to ensure the device meets evolving operational requirements. Those include controlling actuators and logging sensor data.
This experiment has been used as a controllable electric load for the Smart Grid experiment due to its high power consumption. Read section about the Smart Grid experiment for more detail.
A Spirulina harvest has been conducted on SOL 8 and will be done again 3 weeks after the end of our mission to better understand the evolution of the culture and the possible amount of spirulina harvested.
ATMOSPHINDER – Kite Propulsion Exploration Rover
(Erin Kennedy, Crew Roboticist)
Experimental rover investigating seasonal jet eruptions on Mars while propelled by wind.
Atmosphinder’s objective is to investigate the geomorphic processes of seasonal eruptions in the south polar region of Mars, and the role these play in the atmospheric system. An experimental prototype robot was created and tested in an analogous environment at the Mars Desert Research Station.

Fig. 1: Conducting Human-Robot Interaction experiment with Atmosphinder on EVA-16.
Photo credit: Kris Davidson
The robot measured 1.25 meters diameter with two sails of 43.5 x 72 cm. The electronics included a custom circuit board with environmental sensors, controlled with a 600 MHz ARM Cortex-M7 microcontroller, powered by a LiPo 4S 2.65 Ah battery. The structure of the robot comprised of 1/2” PEX tubes joined with 3D printed pieces in PLA, three sealed ball-bearings for the axis of rotation, and waterjet cut 1/8” aluminum metal for the electronics payload bay.
The quantitative and qualitative testing over 7 EVAs reached two key insights:
-
Tensegrity robots, in combination with compliant and rigid structural components, are advantageous for use in extreme environments, such as Mars
-
Human-Robot Interaction (HRI / HCI) when fully suited in astronaut gear requires improved methods to collaborate with space robots
|

Fig. 2: Atmosphinder robot with
sails and electronics
|
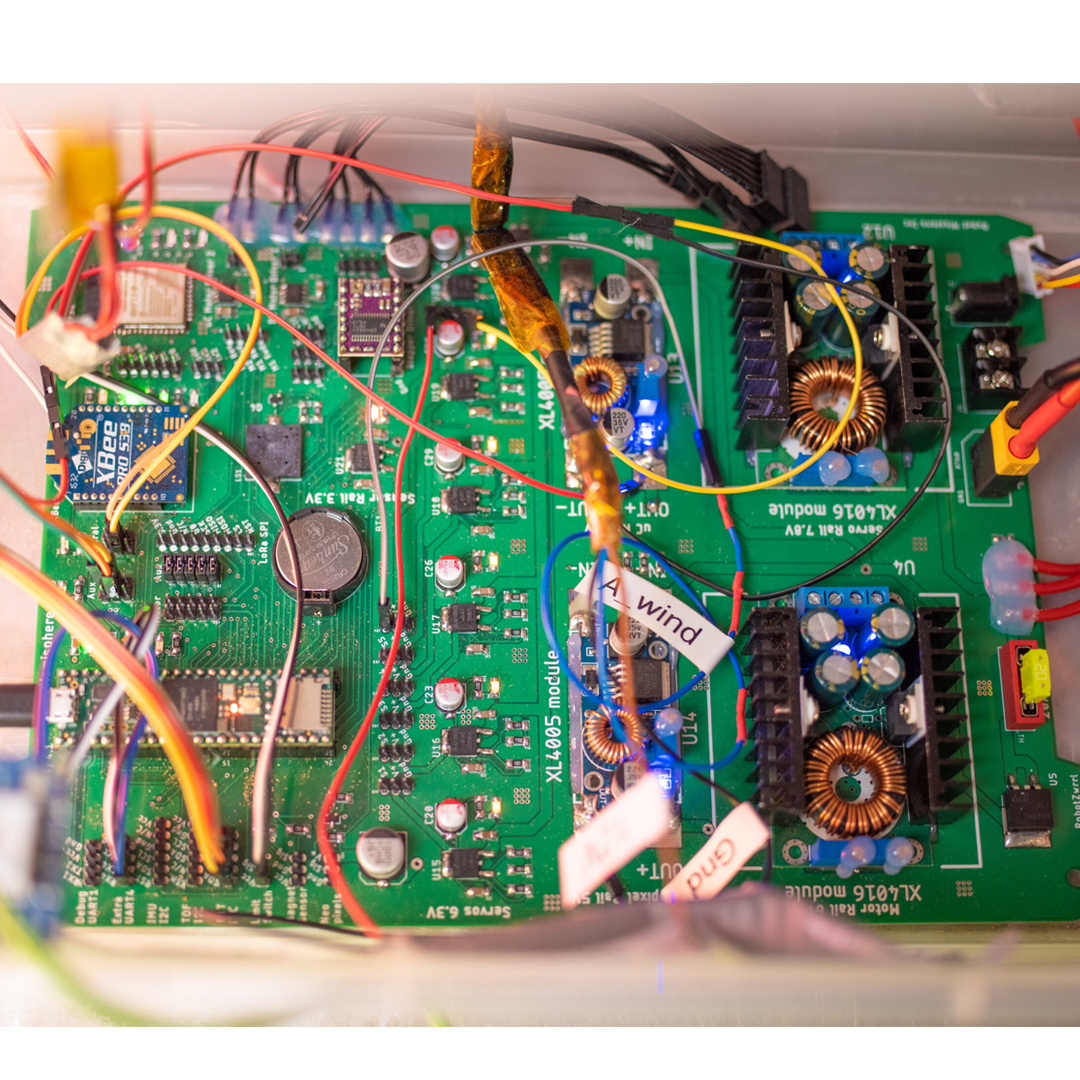
Fig. 3: Atmosphinder electronics
Photo credit: Kris Davidson
|
By the end of the analogue astronaut mission, Atmosphinder accomplished:
-
100 meter unassisted roll as propelled by the wind
-
Sail trim control with servo motors based on anemometer readings
-
Human-robot interaction from fully-suited analogue astronauts using coloured card combinations
-
Data logging environmental sensor mapped to GPS coordinates at 1 Hz
-
Roll down hill with ~30% grade
-
Evaluation of robot status from four 3W RGB LEDs visible in the bright outdoors
-
Sail deflection and force testing in the wind
Geological features analogous to the south polar region of Mars were observed with samples collected, particularly at “Glistening Seas” (4254710 N, 518040 E), located north of the Hab in the vicinity of the Valles Marineris region.
-
Jet vent fracture – represented by clusters of translucent crystalised fragments (Gypsum selenite crystals)
-
Areneiform patterns – represented by paths of brooks (a small tributary) from rainwater etched in the sand
-
South Polar Layered Deposit (SPLD) – Represented by facing a cliff with layers of horizontal rocks
-
Rock ejecta from the CO2 gas jet – Represented by trails of 10 – 25 mm rocks extending for 10 meters
-
Sediment ejecta from the CO2 gas jet – Represented by varying sizes of red / dark stones on white sand
-
CO2 ice formation as southern winter approaches / CO2 ice precipitation – Represented by white sand overlying red sand

Fig. 4: Atmosphinder structure rolling down hill on EVA-12
The results indicate the applicability of a passively wind propelled rover for science and exploration. The key insights derived from the plethora of testing and work conducted demonstrates the value in pursuing the idea further for a higher fidelity prototype, perhaps through an internship at NASA JPL.
Many thanks to the entire crew for the contributions to this project. The Mars Desert Research Station Crew 261 experience provided an excellent opportunity for professional and personal growth, owing to incredible mentorship from XO Aline Decadi and Commander James Burk. Excited to bring forth these learnings into future robotics endeavours!
Additional Resources:
ASTRONOMY ACTIVITIES
(Aline Decadi, Executive Officer and Crew Astronomer)
Conduct astronomical observations using multiple observatories including the onsite Musk Observatory and the offsite Montana Learning Center (MLC)’s New Mexico observatory.
MUSK OBSERVATORY has been used for solar imaging and processing.

The Musk Observatory is a solar facility equipped with a Lunt 100 mm refracting telescope and a double stack of hydrogen alpha filters. The observatory is specifically designed to look at the sun. It comes complete with a zoom eyepiece for visual observations, and a “zwo” camera for solar imaging.
When we talk about Solar imaging, it means that we are looking at the dynamics of a star. The telescope in the Musk Observatory is designed to look at the layer of the Sun called the Chromosphere (~7,500 F) through a hydrogen alpha filter. This gives the Sun the red color that we’ll see looking through the eyepiece.
Aline Decadi has learnt the procedure to configure the telescope using the remote control, and practiced the different configurations and parameters (in particular exposure and gain) to make a good Sun imaging.
Visual observing using the zoom eyepiece:
Visual observing is perfectly safe using the solar telescope. The telescope incorporates several filters, but the most important is the blocking filter/diagonal. It must never be removed.
Aline Decadi has observed the following list of phenomena:
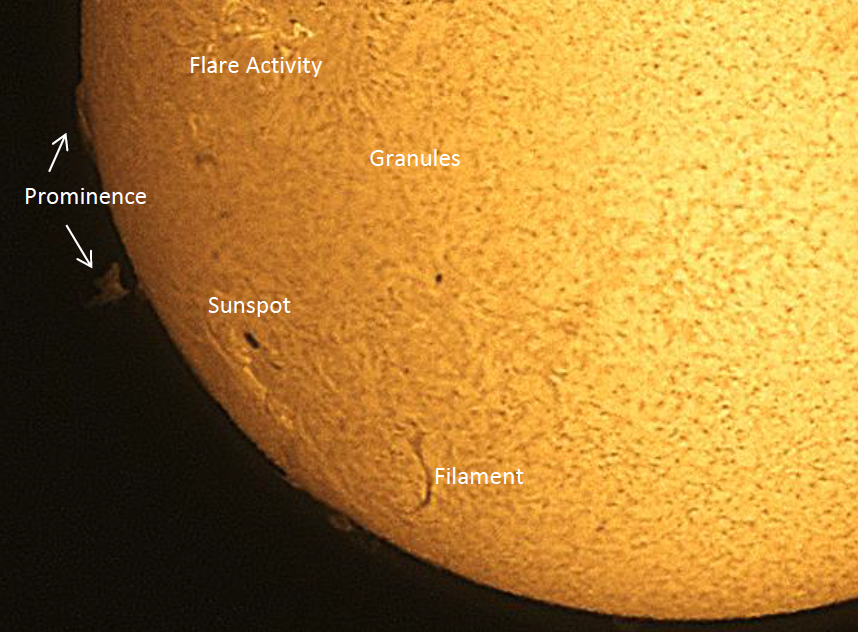
-
GRANULES: This is the surface of the Sun. Convective cells underneath allow the hot gases to rise and the cooler gases to sink, similar to looking down over a pot of boiling water.
-
PROMINENCE: They are the hot gases along the edge of the Sun, following the Sun’s twisted and tangled magnetic field lines.
-
FILAMENT: This is a prominence looking as a dark line.
-
SUNSPOTS: They are magnetic storms that are cooler than the surrounding area so will appear dark in color. Magnetic field lines emanate out from them.
-
FLARES: Bright white areas are indicative of solar flare activity, which are large energy discharges that could pose a problem for an unprotected astronaut.
Solar imaging using the camera:
Solar monitoring will be important on Mars for crew Safety, especially looking for solar flares, to protect the crewmembers on the field from a potential risk of imminent solar flares alert. To get a particularly interesting active region of the Sun, we need to take three images of the Sun and combine them together for the best results.
Aline Decadi has used SharpCap tool to take 1000 frames of each of the following in a video (avi) to be featured in the following order:



Then, those frames have been imaged to stack the best images, process those images to bring out detail, and combine them into a single image. This processing has required a few different programs:
-
AUTOSTAKKERT has been used to stack the images
-
REGISTAX: to add wavelets to bring out fine detail.

-
PHOTOSHOP: to refine the detail, and merge into one image.
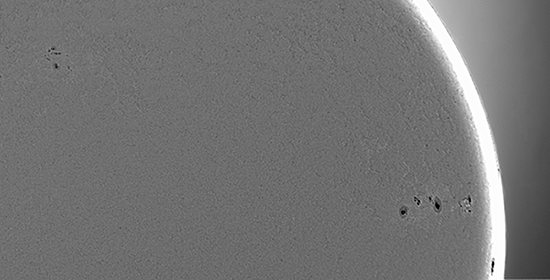
Outcomes:
Sun chromosphere including prominences, granules, sunspots, and filaments have been observed. The sun observation has been performed first with the zoom eyepiece, then with the dedicated camera to capture several thousands of frames and process the images with the following software: AUTOSTAKKERT to stack the images, REGISTAX to add wavelets to bring out fine details, and PHOTOSHOP to merge all in one. The operation of the dome, telescope and computer were nominal. The processed images didn’t show any tracking errors. The only thing is that some frames are dark (underexposed) and others bright (overexposed); that could be fixed by fine tuning the gain and exposure on Sharp Cap. Which gives a very interesting artistic look.
This observatory is beautiful and a real piece of art, ensuring the crew Safety and survival on Mars.
I would like to warmly thank the MDRS Observatory leader Dr Peter Detterline for his constructive advice and huge talent. This has been a great pleasure to learn from him and share his passion – our passion – for astronomy with such high quality material during our mission MDRS Crew 261.
SAFETY DRILLS
(Aline Decadi, Executive Officer and Crew Geologist)
During the mission, we conducted emergency procedure training and practice drills to improve crewmember safety.
Crewmember Needing Assistance on Sol 4:
A Safety Drill has been performed during Sol 4. During the last part of the EVA, the crew experienced an anomaly. While exploring an area approximately west of Pooh’s Corner, Executive Officer Aline Decadi started to smell what she described as a “burning plastic smell”. This was confirmed by GreenHab Officer Cecile Renaud who also smelled what she described as a “sulfur smell”. Fearing that XO Decadi’s backpack components were burning, the EVA team quickly worked to take off her helmet and suit. By the time they had done that, XO Decadi started to feel ill, and felt like she was going to faint. She was assisted back to the rovers by the three other crewmembers: GreenHab Officer Renaud, HSO Audrey Derobertmasure, and Crew Journalist Kris Davidson. The team performed a debriefing session and many issues were raised and discussed. A list of them is below. We also created a set of “Outcomes”, or recommendations, for both our crew’s future operations and the program in general.
Issues Experienced During EVA 5 Safety Drill
-
[Technical] XO Decadi’s EVA gear seemed to create a smell that made her sick, briefly.
-
[Medical] XO Decadi experienced light-headedness due to issue #1. At one point, she was leaning hard on the other crewmember and felt like she was going to faint.
-
[Procedural] When individual crewmembers experienced Comms issues, not all crewmembers worked together to resolve them.
-
[Procedural] Rovers did not stay together at all times, and certainly within sight of each other. One rover should never be out of sight of the other.
-
[Procedural] Crew members would often talk at the same time.
-
[Procedural] One crewmember stayed on Channel 1 during the entire EVA, despite the Comms issues. Crew members should switch to Channel 2 when having comms issues between each other.
-
[Procedural] Removing XO Decadi’s helmet in an emergency situation was done in a suboptimal way.
-
[Technical] Our Garmin device did not trigger an email to Mission Support, as was designed.
-
[Procedural] It is safer to go to the furthest point of the EVA and then work your way back closer to the Hab. Instead, the EVA team first stopped near Marble Ritual and then north of Pooh’s Corner, with the intent to eventually get to Gateway to Candor. Instead they should have driven all the way to Gateway and worked their way back in the direction of the Hab.
Outcomes from EVA 5 Safety Drill
-
Air flow of a backpack can be left on while the helmet is removed. In today’s case it was rightly switched off by one crew member while two others were removing the helmet, because of the nature of the perceived issue (burning component in backpack). In other emergency cases, keeping air flow on would be desirable
-
We need to be using hand signals, especially to communicate comms outages or when driving a rover with a sick crewmember in passenger seat (ie, “Are you ok?”)
-
Crewmembers should always carry water on their person, and there should be at least one emergency water bottle carried by the EVA crew in the rover. By utilizing a carabiner clip with a water bottle that has a loop at the top, a crewmember can easily stow it on their person so that both hands are free.
-
EVA members should have a mandatory water break every 20-30 mins, to keep ahead of any thirstiness or dehydration. We have noticed this can creep up on you quickly, and we keep powering through minor thirstiness only to suffer severe thirst later in the EVAs. Often, peer pressure or psychology prevents people from being the first to pause the EVA for reasons like this.
-
When two rovers are driving, the person driving the rover should communicate with the other rover driver, and the other two (passenger) crew members should remain quiet.
-
There should be a mandatory comm check at the beginning of every traverse. In today’s case, one rover lead was trying to communicate with the other, but they were not heard.
-
The EVA suits should support rapid removal of helmet and backpack battery in the case of an emergency.
-
EVA teams should carry sugar packets to help ill crew members. In today’s case that would have helped.
-
For our crew’s HSO, the threshold for breaking sim would have been an actual fainting, not an “almost” fainting. In today’s case, the incident did not meet the threshold, although we broke the sim anyway due to the backpack smell issue.
During Sol 5, XO Decadi conducted a training session with all crewmembers for emergencies in the field with the purpose to expose what kind of hazards may happen on the field, how to detect and make decisions on the most appropriate “way for action”. Then we trained on how to remove the helmet/backpack in different degraded situations as quickest as possible.

Safety training session
As an overall outcome: Aline Decadi shared the list of necessary improvements of the suits/ backpacks featured for Safety, with the team Mars-Cal in charge of the refurbishing of the MDRS Space Suits every year. Their point of contact is Cynthia Chahla.
-
Integrate a water bag (+ maybe a juice bag) for long EVA
-
Integrate a urine bag for long EVA
-
Find a way to fix a camera (e.g. size of a gopro) for continuous imaging on EVA
-
Audio/ Micro: add a wireless earpiece/ integrated micro as a backup of the headset that sometimes move and comes out (even if fixed with a bandana).
-
Add a color tag on the current push button to make it more visible (everything is black and not easy to find)
-
When 3 Analog Astronauts (i.e. AA) (or more) are on EVA, there is an issue with the audio volumes that may be low for one AA, and too loud for the other AA, and it hurts the ear. A low frequency pass filter may be necessary to remove the high frequencies for instance.
-
Add a small box to be fixed on the chest with an integrated mirror to see what is behind when in EVA
-
Add in this small box a hand-mirror to be able for the AA to see behind while driving a rover for instance
-
Have access from the exterior of the suit to the batteries to pull them out in case of emergency in only a couple of seconds (today we need to spend a lot of time to try to zip everything)
-
Be able to make regular control/test of the electrical devices in the suit to confirm if they are functional – as a prerequisite for each EVA or after a technical issue for troubleshooting.
-
The 2 latches on the rear part of the red ring collar are not easy to open/close due to their interference with the backpack. A solution should be proposed to ease their manipulation.
The Mars Society’s Northern California chapter, who does incredible work with maintaining our analog suits, has received this list and confirmed they’ll incorporate all these details on the next improvements to come.
Search & Rescue Drill on Sol 12:
A second Safety Drill has been performed during Sol 12 to train for another type of emergency Scenario.
This safety drill involved James Burk (Commander) and Aline Decadi (XO) taking a rover on a new route never traveled before and getting stuck and needing to be rescued. In actuality, the Commander and XO planned this out and discussed with Mission Support the night before, and so the entire situation was meant to improve safety and awareness on the part of the crew on what to do in an emergency.
Commander James Burk and XO Aline Decadi took out to rover Spirit at approx 9am and drove north on the main road to the “Gateway to Candor” turn, on a planned traverse to the area south of Compass Rock, ostensibly to investigate a route to the southern ridge of Candor. We had never taken this route before on this mission and it is marked on the map as a footpath.
We lost comms as normal, when passing behind the north ridge near Pooh’s Corner, but we also did not make any attempt to reestablish comms throughout the EVA, as was part of the drill parameters. We did not turn on the Garmin tracking device since that would have made it too easy for the crew to find us, and we ignored a couple reminders from HabComm to do so.
Once on the Gateway to Candor, Commander Burk turned south and drove offroad in Spirit, looking for a suitable place for the EVA Team to “hide” so that it would not be obvious on a large flat plain where we had “gotten stuck”. We also tried to not leave obvious tracks with the rover so took a few windy turns and other methods to obfuscate our route.
We chose to “hide” in a U-shaped area that was approx. 2 km east-northeast of the campus, and southwest of Compass rock, on the other side of a landform so that if the crew just automatically went to Compass rock (where we have spent a lot of time on this mission), we would not be found.
Commander Burk and XO Decadi parked the rover and debarked. We removed our helmets, as discussed prior to the EVA, since this was a rescue drill and we were planning to break sim anyway. We had prepared to be at that location for a couple hours if needed.
We decided to take the opportunity to record a couple narrative videos about what we were doing, to help with XO Decadi’s education & outreach project. We explained the drill and send the SOS ping “MDRS Assistance Required” which our crew uses when it’s a non-emergency situation but we are requesting support from the Hab to the EVA team. We hoped that the crew would react well and work together to find us.
After only a few minutes, we heard a drone flying nearby, which was obviously Crew Engineer Julien Villa-Massone’s attempt to locate us. After exactly 20 minutes, a rover carrying Villa-Massone and GreenHab Officer Cecile Renaud appeared. They walked to our position and we confirmed it was a drill, then we spent about 10 minutes doing a debrief before returning to the Hab and having a longer debrief session with the whole crew.
We learned that some members of the Hab Crew forgot that assistance required means that they are safe so they treated the entire situation as an emergency, and were worried that the EVA crew was not working on getting back in Comms. As mentioned, Mission Support was in on the drill and did almost nothing to help them, even telling them “No Drone” to ensure they were not relying solely on a drone for rescue.
Overall, we were very happy how the crew rallied and worked together to establish a rescue operation and arrived only 20 minutes after the initial SOS ping was sent. It was a great experience for all crewmembers and a great way to cap off our successful mission to the MDRS.
Timeline
8:52 am EVA started
HabCom sent a message to EVA crew via Garmin InReach that tracking was not turned on
9:20 am EVA crew sent SOS Ping “MDRS Assistance Required” (Non-EMS) via Garmin InReach
9:22 am Received MDRS Assistance Required message via Garmin InReach
Mission Support (Sergii) was contacted, confirmed we should go (break sim)
First Aid kit bag was created, given to Cecile and Julien
9:27 am Cecile and Julien took Perseverance rover SOC: 98%
9:30 am Cecile and Julien on the road
EVA crew hears a drone sound (9:35 am?)
9:40 am Cecile and Julien at Gateway to Candor (website)
9:42 am Rescue team (Cecile and Julien) arrives to EVA crew (Aline and Julien)
9:38 am Cecile reports SOC 98%. They see the tracks of James and Aline’s rover that didn’t take the right road
9:50 am Cecile and Julien report that everything is OK with James and Aline, they are discussing about the drill
10:00 am Status update from Cecile: They are going to come back to the Hab
10:06 am Cecile reports Perseverance SOC: 94%
10:07 am Aline reports Spirit SOC: 75%
10:14 am EVA-2 Cecile and Julien in sight from Hab
10:16 am EVA-1 James and Aline in sight from Hab
10:17 am Cecile – Perseverance Hours: 129.0, SOC: 94%
10:17 am James – Spirit Hours: 222.0, SOC: 71%, plugged in
10:18 am 0 min Hab decompression requested (Sim already broken)
10:19 am Everyone is back in the Hab
Mission Support (Sergii) updated on the status
What Went Well
-
Crew all understood that it was clear to break sim (Safety over Sim)
-
Crew’s priorities were correct and everybody rallied
-
Everyone was safe at all times and nobody got hurt during the exercise
-
Rescue team found EVA team only 22 minutes from initial communication
(James said his expectation was minimum 40 mins)
Areas for Improvement
-
Some time was taken (~ 2 mins) regarding asking about if the drone should be used to investigate first. Mission Support was firm “No Drone”.
-
Disruption when initial Comms was happening
-
Confusion regarding retrieving a medical kit bag (there was none available, and the Hab’s main kit was taken)
-
Raspberry Pi stopped working / slow, mouse being intermittent, had to access webpage on computer, did not have URL handy.
-
There was only one person who could fly a drone, and they went on the rescue team.
-
There was confusion and lack of communication about who was going on the rescue team
-
Confusion on who was speaking on the radio, especially with similar sounding voices and accents. Confusion about who was acting as HabComm after Cecile (primary HabComm) left.
-
Cecile lost valuable data from her experiment that she was in the middle of collecting when the drill happened.
Issues Experienced during EVA-19
-
The crew back at the Hab did not fully understand the difference between our “MDRS Assistance Required” non-emergency/non-EMS ping and our Emergency SOS ping that is connected to the red SOS button on the Garmins. The former is meant when there is no crew injury or safety issue and the latter is for a true emergency when you need all-hands on deck including county EMS and Mission Support.
-
The crew was confused who was doing what role, and one person expected to go on the rescue team but wasn’t chosen. We plan to address this by recommending that all EVA teams have a designated rescue team.
-
The Hab does not have a quick carry medical kit for EVA rescues. In today’s case, the rescue team took the Hab’s entire medical kit with them.
-
There was confusion over who was HabComm after Cecile (who had been the primary HabComm) joined the rescue team.
-
The crew was not sure what emergency number they might need to call, other than trying to contact Mission Support.
Outcomes / Recommendations to consider for next Crew missions at MDRS:
-
The Hab should have a quick carry medical kit with needed supplies for broken bones, bleeding and other life threatening emergencies.
-
Every rover should have a first aid kit that is mandatory. This should be checked routinely throughout the mission.
-
Crews should designate a rescue team prior to EVA
-
Crews should carry a signaling device such as a reflective foil blanket in the emergency medical kit bag.
-
When using Radio Comms, people’s names should be used after breaking sim.
-
Need to remember to pause a bit before talking on Ch. 1 (repeater).
-
Role changing (ie changing who is HabComm) needs to be identified (“Audrey doing HabComm” or don’t use roles at all, just people’s names.
-
The person requesting assistance should advise if sim is being broken.
-
Water to go with the medical kit bag should be prepared
-
One person on the EVA should be assigned responsible for the medical kit bag
-
We are lacking some basic medical supplies for emergencies such as AED (see HSO recommendations as reported early on in the mission).
-
1st person to identify assistance required should make an announcement on radios regarding breaking sim
-
HabComm has to be located in the Hab, cannot have any science experiments or engineering work ongoing, just light work on a computer and focusing on the EVA status. In today’s case, Cecile was trying to multitask and ended up losing valuable biological experiment data because of the perceived emergency.
-
Every crewmember should understand how to trigger a real SOS by using the dedicated button on the Garmin InReach. Pushing the actual button is not straightforward and it should be practiced. Garmin SOS can be canceled within 20 seconds, so there is no risk to pushing the button as long as you cancel.
-
Every crewmember should understand the different ways to contact EMT in the case of a real emergency.
-
Crews should have a training procedure to call SOS prior to doing EVAs.
MDRS SMART GRID – Power Control System
(Julien Villa-Massone, Crew Engineer)
Experimental power control system to ensure sufficient energy is available at all times.
The goal of this experiment is to demonstrate how a smart power system could operate in a Mars base. A resilient, self-balancing power grid is vital to prioritize operation of life support systems, which maintain humans alive.
A smart power system is designed to ensure the power grid is available at all times, despite fluctuating power supply resources. Without this capability, a power grid could completely shut down if too many loads are drawing power simultaneously, or if not enough energy is present due to low power supply and battery state of charge, with devastating consequences.
Such a system is relevant whether the base is supported by renewable or nuclear sources, due to inevitable technical faults, maintenance operations, performance deterioration, thermal regulation and other constraints that arise from operating a power plant in a rough environment. Furthermore, base overgrowth and the steady increase in electrical loads can cause the base to become underpowered over time, before new power sources can be installed and connected.
Levels of priority are assigned to all controllable electric loads on the base, as suggested:
-
Safety: Life support systems, time-critical food supply, base management computing
-
Comfort: Temperature, lighting
-
Non-time-critical: Food production farm, analysis computing
This is a simplified priority list for the sake of this discussion. In a real case, each load would be assessed for criticality and time-criticality, and be assigned a priority level and a power supply profile.
Non-time-critical loads such as food production can be reduced (reducing or pausing growth rate) but not entirely shut down (potentially killing crops) until power supply recovers.
This demonstration consists of 1 Power Controller and 1 Controllable Load. The Power Controller measures power supply parameters and communicates with the Controllable Load to augment or reduce its power usage, as available power requires. The Controllable Load receives power usage instructions from the Power Controller, adjusts its power consumption accordingly and acknowledges.

MDRS power system Algacraft Bioreactor controllable load
The Algacraft Bioreactor experiment, representing a food production farm on Mars, has been chosen for this project due to the high power usage of this type of system and ability to vary its power usage between two limits without causing a significant impact on its operation. This reflects future operations on Mars where food is being produced as quickly as possible given power available, but where growth can be temporarily slowed to match available power.
This project has been successful in that the Bioreactor experiment continuously adjusted its electrical consumption based on battery SOC (State of Charge) and solar power available, according to a power control algorithm. When running with high SOC or high solar power, the load operated at 100% of its nominal power usage. When less power was available, the Bioreactor lowered its power usage according to the power controller requirements. As a result, the batteries drained less quickly and energy was conserved in favor of other, more important loads.
A monitoring system was implemented to help the crew understand the current status of the power system and the smart grid operation.
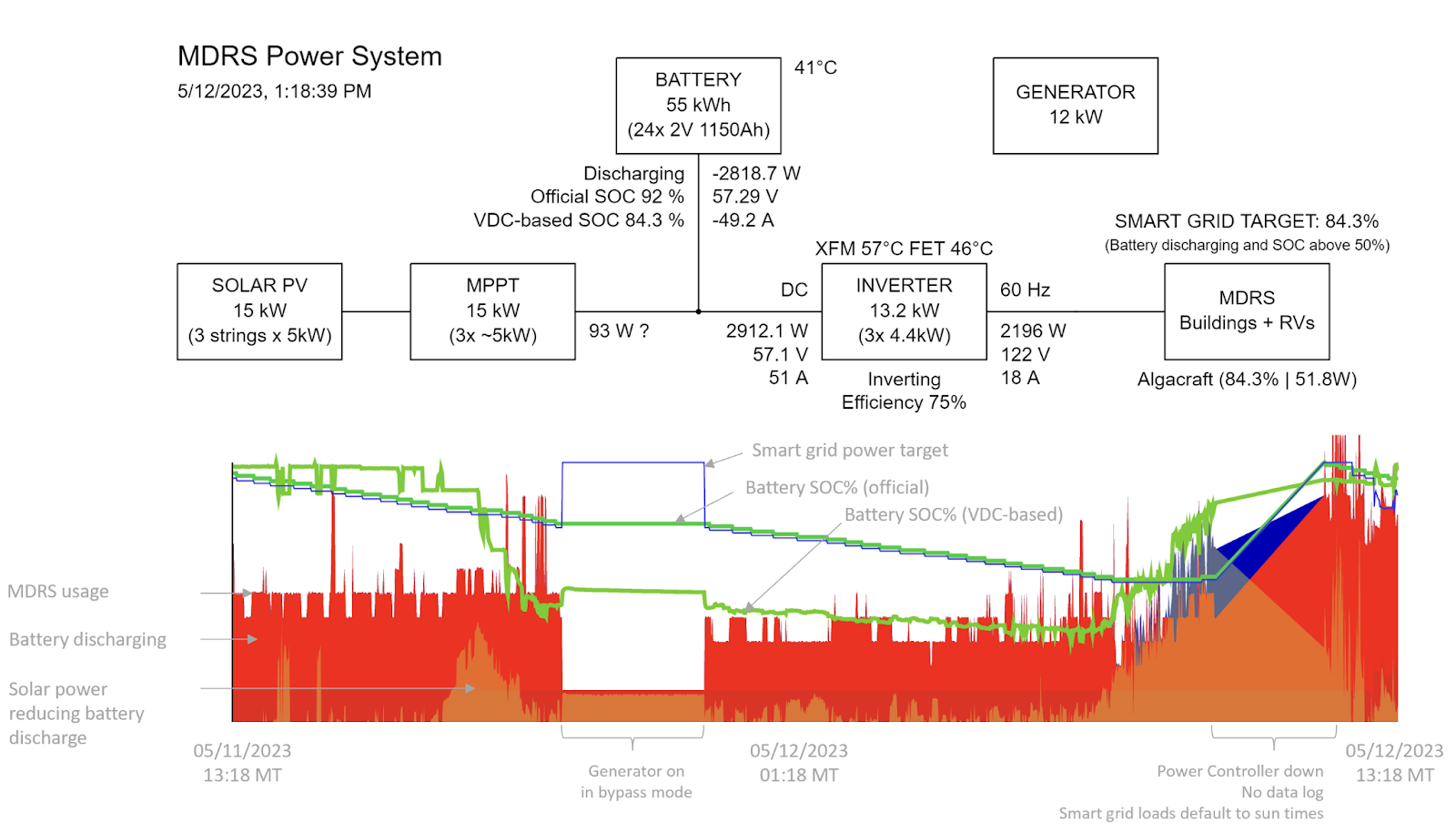
Screenshot of the power system monitoring including smart grid data and 24h history chart – gray labels added for clarity
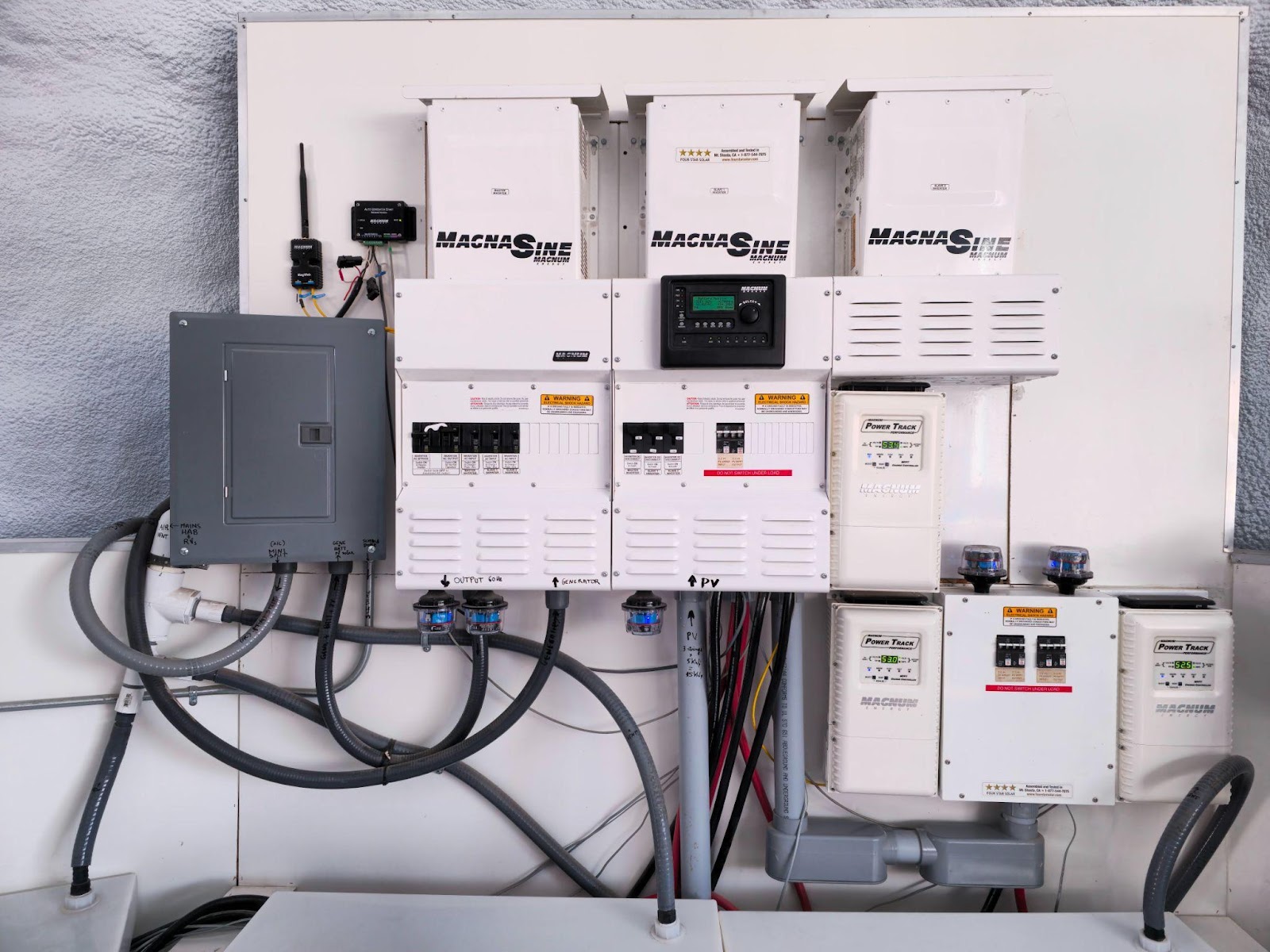
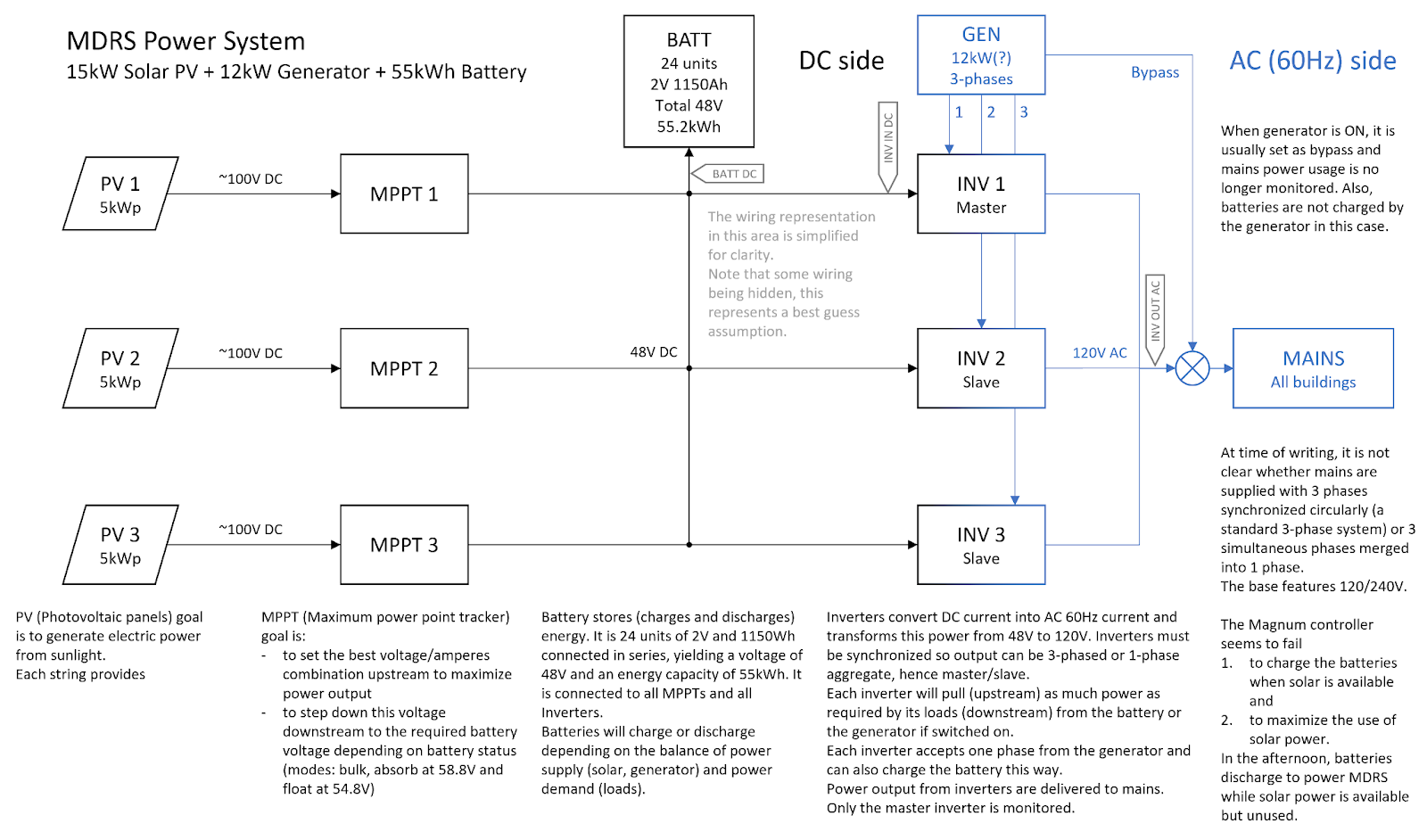
A by-product of this experiment has been to draw a schematic of the MDRS Power System (to the extent of observable cables).
STATION RESOURCES AND EVA MONITORING
(Julien Villa-Massone, Crew Engineer)
Improve monitoring toolsets for conservation of water and power at the station (both by our crew and future crews) and increase EVA situational awareness
A monitor has been set up in the Hab common area to help the crew understand and adjust resource utilization over time as well as monitor EVAs.
Water – Manual measurements performed several times per day and plotted on a chart, with trend projection to end of mission.
Power – Automated measurements displayed on system schematic and plotted on history chart. Refer to MDRS Smart Grid for more details.
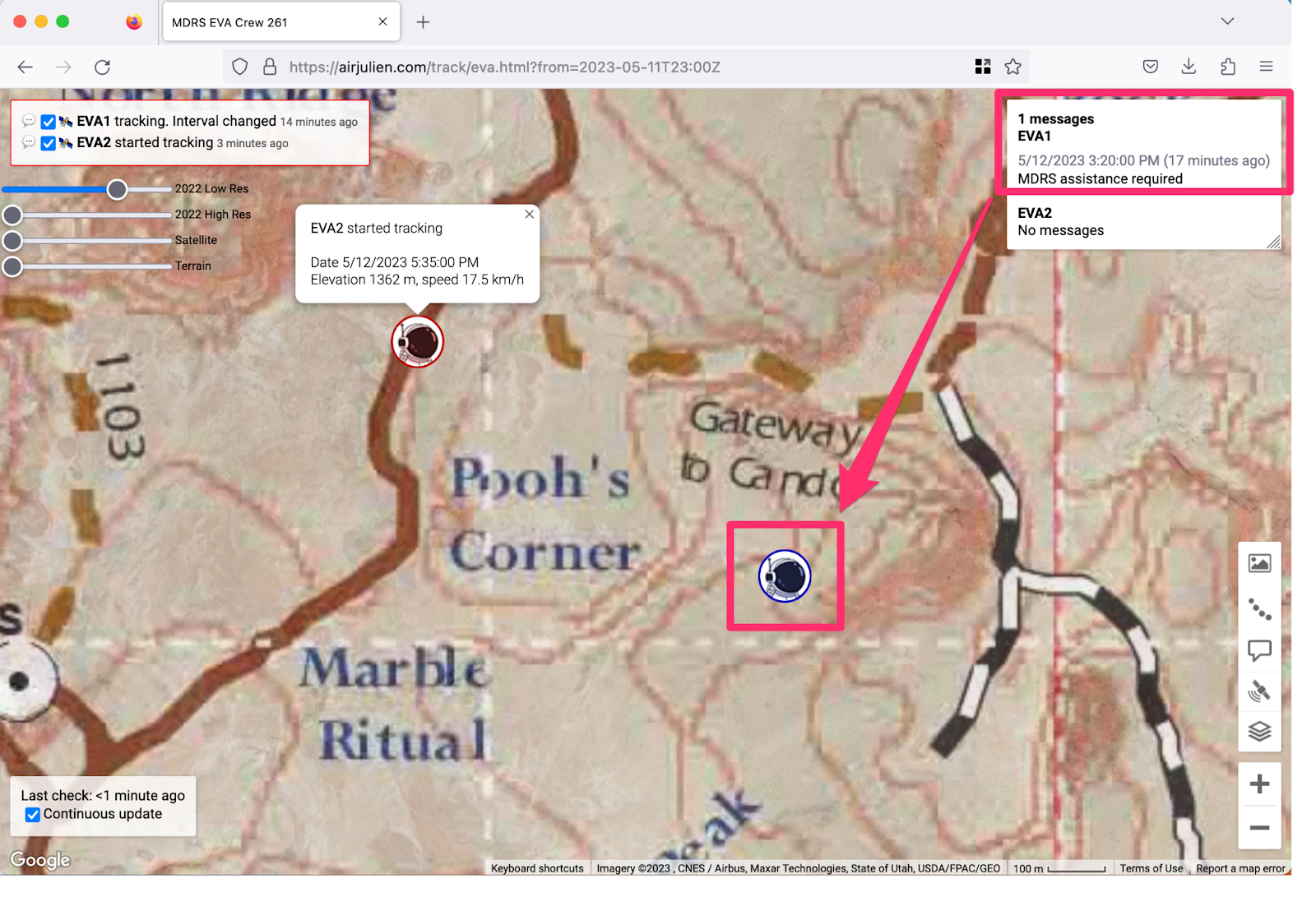
EVA – A map showing crew members current and history location on various map types, with near real-time (2-minute delay when nominal), using the Iridium satellite network.
These web and local applications have been developed for this mission in python and javascript. A pair of Garmin inReach devices have been used to report location over Iridium.
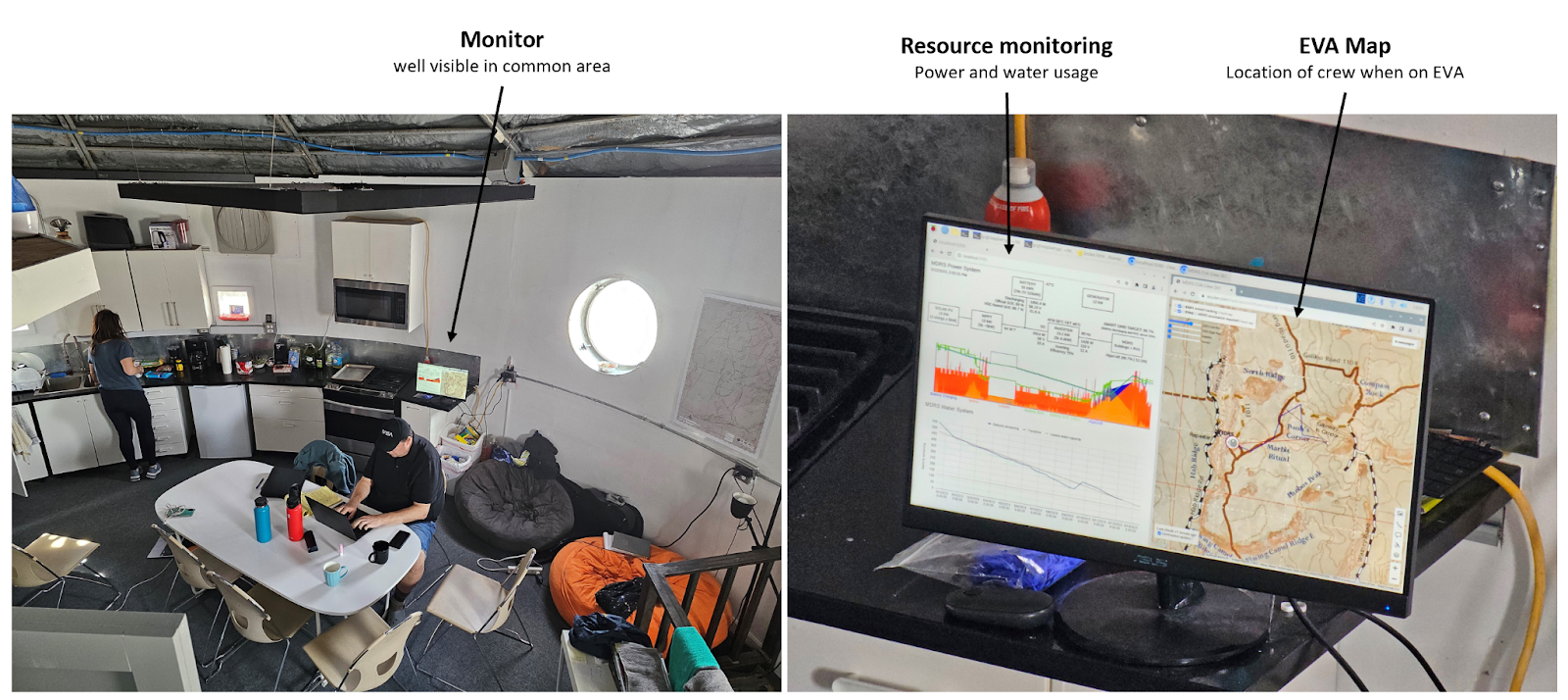
Integration of the Monitoring System and EVA Map in the Hab
The outcome of the resource monitor has been better management of the water resource and a better understanding of the power system. The power resource utilization has been more difficult to adjust for crew due to issues with the power system sensing and operation at the base, and because most loads under crew management (lights and water boilers) had limited impact, with exception of rovers.
The outcome of the EVA map has been a much safer environment for crews in EVA, and a higher situational awareness for crews performing Habcomm duties. During an emergency drill where a crew of 2 pretended to require assistance, only 22 minutes were needed for the rescue team to reach.
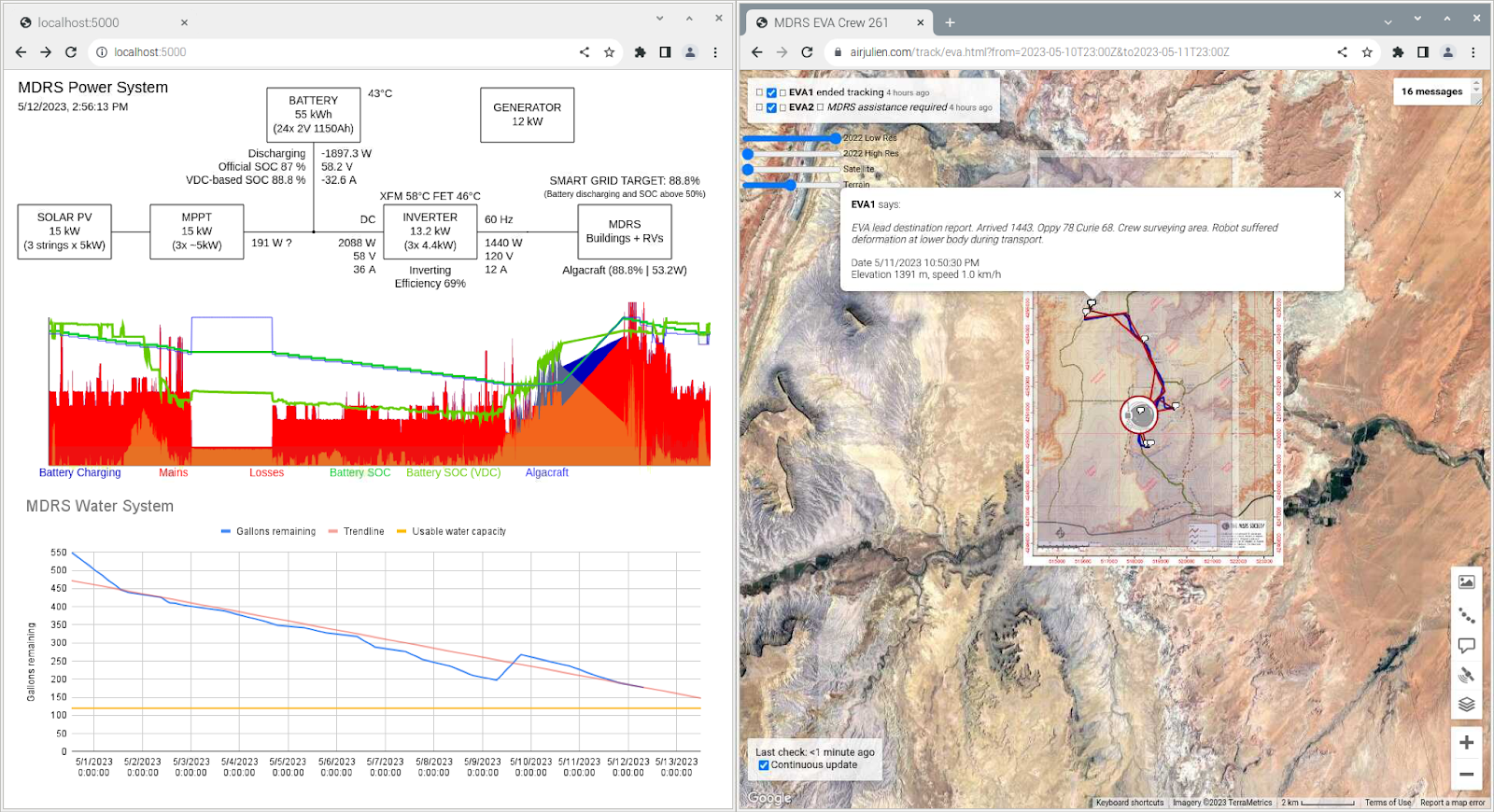
Screenshot of the power, water and EVA monitoring system
JOURNALIST/ARTIST IN RESIDENCE
(Kris Davidson)
As the crew journalist, Kris Davidson documented crew experiments, projects and activities for three purposes: 1. For documentation and PR/Marketing material for the Mars Society 2. For documentation and for individual crew members, and 3. For Davidson’s ongoing art project that looks at American storytelling across time, intended for book publication and creation of artwork.
In her capacity as the crew journalist, Davidson photographed and created videos of the crew going about their work, and she wrote daily editorials weaving in the narrative of each Sol. She provided support to the Commander in coordinating two media visits. Davidson also created, updated and maintained the crew website https://www.transatlanticmarscrew261.com.
At the conclusion of the mission, Davidson will edit and process the images, and the upload selects to a private, password protected website for The Mars Society and crew members. She will also update the website based on the final report and maintain it as a comprehensive record of the work performed on the mission.
MARSVR – VIRTUAL REALITY COORDINATED FIELD SCIENCE DEMONSTRATION
(James Burk, Commander. PI: Jeff Rayner, MXTReality)
Demonstrate the use of a digital twin of the Mars Desert Research Station and its surrounding terrain to plan EVAs, provide crew acclimation and training prior to MDRS missions, and to allow EVA crewmembers to get direct support from HabComm and remote support using virtual reality technology.
Overview
The MarsVR project was started in 2017 after Commander James Burk had the opportunity to get a private tour of NASA’s Jet Propulsion Laboratory, as part of a delegation from the Mars Society Convention that was happening in nearby Irvine, CA. During the tour, he and others were shown the inside workings of the Curiosity rover’s science team and their use of Microsoft Hololens augmented reality glasses to plan the science operations of the mission. The Curiosity science team could put on the Hololens glasses and immediately experience a hyper-realistic and fully immersive view of the surface of Mars captured by NASA mission imagery that had been processed into VR on a daily basis by the JPL team using advanced software engineering techniques and a brute-force method of creating VR-enabled terrain using a large amount of AWS cloud computing power. The resulting experience included the current position of the Curiosity rover with a 3-D model of it, and information overlays about the rover’s previous Sol positions and future plan. The Mars landscape was rendered beautifully, and instead of poring over a printed map, the science team could simply walk around the area, looking for interesting rock specimens to visit or analyze, while they were all physically present and seeing/talking to each other in the JPL Ops Lab.
For Commander Burk. who is a professional software developer formerly with Microsoft, it was an extremely visceral and life changing experience, and one that continues to motivate him to this day. His immediate thought was “more people need to experience this. It should be in schools and museums.” He excitedly quizzed the JPL staff on their past attempts to meld the technology with their public outreach efforts, and quickly realized that not only was JPL still learning how best to do it, that having this particular solution in a place like Kennedy Space Center was not practical or sustainable financially for NASA to offer.
His thoughts then went to the Mars Society and our ability to do great things with a small amount of resources and a large amount of volunteer enthusiasm. After returning home to Seattle, he had several conversations with Robert Zubrin, Dr. Shannon Rupert, and other volunteers and VR experts who were interested in helping. The possibilities of this concept exploded. Zubrin and Burk believe that Virtual Reality can play a role in how Mars could be explored on a large scale, by millions of people back on Earth using Virtual Reality to coordinate the activities of the on-site astronauts on EVA, and we could practice this by using our MDRS analog research facility in Utah.
In the months that followed, Burk organized a Kickstarter campaign with a goal of $25,000 to create a proof of concept of a simple virtual reality application that would feature a digital twin of the Mars Desert Research Station and at least a square mile of Mars-like terrain. The crowdfunding campaign easily exceeded that amount and ultimately, Commander Burk, former volunteer Shannon Norrell, and others created an initial proof-of-concept environment.
The early MarsVR development team faced many challenges, including the immature state of virtual reality tools and hardware, the massive scope of the project, and the extremely high difficulty of what they were trying to do. Nevertheless, the team succeeded in creating the initial digital twin of the campus, processing 30k high resolution photos of the Utah desert into a single FBX object, and building out the initial MarsVR Unity application which included an EVA suit donning procedure and the interior and exterior of the MDRS campus, which had been scanned using cutting-edge photogrammetry techniques.
This experience was demoed at many events including the Mars Society conferences, the Seattle-area Virtual Reality meetup, and venues such as Yuri’s Night at Seattle’s Museum of Flight, the Pacific Science Center, and other chapter events around the country.
The project was never intended to be a commercial effort, and the volunteer team freely gave away assets to interested researchers and enthusiasts, and provided assistance on how to run and demonstrate the application to anybody who asked. Several Mars Society chapters took advantage of this opportunity and built outreach events around the VR experience.
Over the next years, Burk continued to search for volunteers and assistance to improve the MarsVR experience and do more to realize this vision. In 2019, he was connected through a mutual colleague in Seattle to Jeff Rayner, the CEO of Seattle company MXTReality (pronounced “mixed reality”), who has a degree in astrophysics and is a space enthusiast. The MXTReality team initially began as volunteers, working to upgrade and modernize the proof-of-concept app and add additional content so that the original scope of crew training could be developed. But they also realized that a large sustained development effort would be needed to realize the vision of the project, and that relying on volunteer time alone was too slow and inconsistent for this type of advanced software engineering.
They decided they would need to raise additional resources for the advancement of the project. Together, Burk and Rayner planned and executed a second crowdfunding campaign in 2021, this time with a goal of $100k, to further develop the project. The newly expanded MarsVR development team exceeded its goal again, raising $109k and attracting new partners and new supporters. Several of the MXTReality staff joined the MarsVR team full-time, and over the next three years, they greatly expanded and enhanced the experience, adding support for newer Virtual Reality headsets and immersive peripherals. The results of their work, a newer and much improved version of the MDRS digital twin and its crew training procedures is now available for free download on the Steam video game platform.
In 2022, after Burk had been elevated to the new full-time position of Executive Director by the Mars Society board, the team was challenged by Robert Zubrin to create a method using MarsVR to allow EVA crewmembers at the MDRS to get direct support and maintain voice, data and possibly even visual communication with VR participants. Zubrin believed that the team could demonstrate the ability to do coordinated field science through VR, with a crewmember out in the field on EVA working alongside a VR participant anywhere in the world. The utility of such a solution would be massive, allowing it to be used for remote science and engineering support, training, and public outreach.
Also in 2022, the MarsVR team, led by Burk and Rayner, joined forces with the Mars Society’s Chicago chapter who have created the EVALink project, which is meant to utilize low-cost Meshtastic LoRa radio devices to capture EVA crewmember’s positional and other data. By developing, maturing and integrating EVALink into MarsVR, we can create a solution that allows EVA crewmember position data to be captured in near-real time and fed into the VR app through an onsite Meshtastic and radio comms relay and a cloud-based server solution.
At the time of our current mission (MDRS Crew 261), much work on this phase of the project has already been done and demonstrated, but the solution is still moving towards operational status. We have the ability, with a new version of the MarsVR application called Mars Comms, to have multiple people wearing VR headsets and using voice communication, as well as manipulating the VR environment with drawing tools and other objects. The EVALink solution is also functional, allowing the Meshtasic devices to capture data on the crewmember positions and retrieved via JSON API. Visualizations of the data overlaid onto terrain maps can now be created and EVA’s “played back” using the positional data.
Crew 261 Activities
Commander James Burk originally met XO Aline Decadi when demoing MarsVR to her at the 2018 Mars Society Convention in Pasadena. Our intent was to be the first crew at MDRS to plan & execute EVAs using MarsVR, and to demonstrate coordinated field science scenarios.
We conducted an orientation session with crewmembers on SOL 3. Burk demonstrated both the MDRS VR experience (single user), which is the high-fidelity digital twin of the MDRS campus and a 2km terrain segment, as well as the new MarsComms VR experience with multiple user capabilities that is designed to work in tandem with the EVALink devices. He demonstrated the ability for the crew to access the Map mode of MarsComms and discussed the possibility of our crew using it to plan and support EVAs using the technology.
Prior to the mission, we procured three new Meta Quest 2 headsets for use by the crew, which arrived safely and were unboxed on SOL 1. However, due to very poor timing on the part of Meta/Facebook and changing its authentication mechanisms through a product rebranding from Oculus to Meta, we were unable to get these new headsets properly set up while onsite at the MDRS. We could not get past a technical issue, where the new headsets could not complete basic initial setup due to an inability to pair with a mobile device and a new Oculus/Meta user account for each device, because the newer authentication did not work with the older version of software preloaded on the new hardware devices. This was compounded by the limitations of the Meta Quest 2 headset to not have any capability to be flashed with new software until after initial setup was completed, which created a catch-22 situation where each problem’s solution was blocked by the other problem. This was deeply disappointing to the crew and we wasted valuable time trying to address these issues and find workarounds, ultimately giving up as to not waste more time while at MDRS.
We did have one working Quest 2 headset (James’ personal headset) which had both experiences pre-loaded, and that was used for the demo. But the goal of having four crewmembers in the lower deck of the Hab, all the VR experience at once, and planning EVAs using the terrain map, was never able to be achieved.
Forward-Looking Plan
After the mission, the wider MarsVR team will continue to work on the overall project and individuals from Crew 261 will stay involved. We pledge to ultimately get this technology working for future crews to use at the MDRS, and for the Mars Society to showcase it as one of its key successful volunteer-driven efforts. The vision of someday using virtual reality to explore Mars remains in place, and the Transatlantic Mars Crew 261 is committed to making it a reality.
EVALINK
(PI: Erik Kristoff, Mars Society Chicago)
Integrated system using Meshtastic low-bandwidth open source hardware devices to improve science, situational awareness, and crew member safety at analog research stations.
Overview
As per the above, the goal of EVALink is to capture and transmit crewmember positional (and other) data in near real-time from the field, utilizing low-cost Meshtastic devices.
For this initial test of EVALink operations while an MDRS crew is in sim, we utilized two models of Meshtastic devices:
1) A small white-colored T-ECHO device that can be worn by a crewmember in their EVA radio harness or elsewhere on their person.
2) A single board T-BEAM device that can be integrated with larger components such as antennas and batteries to expand its capabilities.
Crew 261 Activities
For our mission, we worked with the remote EVALink and MarsVR teams in Chicago and Seattle, respectively, to test and troubleshoot the technology. We have a total of 10 Meshtastic devices on site including 9 field units and 1 relay unit that facilitates the writing of data to a cloud-based server. We ensured that all devices are functional and each EVA crewmember has carried one or more devices on their person during EVAs, typically within the front pocket of the crewmember’s EVA radio harness.
On SOL 7, Commander Burk worked with the remote EVALink support team to reflash several of the devices to ensure they were all using the same Firmware version and are able to connect and see each other.
On SOL 9, Crew Engineer Julien Villa-Massone and GreenHab Officer Cecile Renaud placed a Meshtastic device on a north-facing ridge in the vicinity of Pooh’s corner to expand the range of the devices.
We were successful in collecting positional data from all of our EVAs, and we also made use of a Discord-based radio relay to record EVA audio transmissions. These were firsts for the MDRS program and are a tremendous technical accomplishment that the EVALink, MarsVR team, and Crew 261 are all very proud of.
We have now processed audio recordings of our EVAs, one of which we provided to the visiting TV journalist, and we have received anecdotal visualizations of some of our EVAs on terrain maps. More work can and will be done after our mission to showcase the 20 EVAs we did, some of which were long-range and quite interesting, and to integrate map locations, photos, audio, our drone and other video footage together to be able to tell the story of an MDRS EVA in a brand-new way. The potential of this technology is clear and we are excited to continue working with the teams to realize the vision.
Garmin-Based Solution to Test EVALink Operations
Our crew developed our own internal system, led by Crew Engineer Julien Villa-Massone, which mimics the eventual functionality of real-time EVA telemetry and visualizations using a solution comprised of a custom software stack and off-the-shelf commercial Garmin inReach devices that have satellite-based positioning functionality.
The crew has found this solution extremely useful as an enhancement to our typical radio communications and situational awareness of EVA crew position & status. Much like EVALink will be able to do, our Garmin-based solution is able to see Crewmembers visualized in near-real time (2-10 min delay). It also enables the ability for a crewmember to send “Points of Interest”, or GPS waypoint pings, at times and places of EVA crewmember’s choosing, which based on the context of the point, can provide levels of information to HabComm. Finally, it can send short SMS-style text messages between the Hab and crewmembers.
FILE SERVER
(James Burk, Commander)
Installation of Synology NAS file server with hybrid cloud capabilities to be used for research sharing between crews and other purposes
Overview
The intent of this experiment was to test the use of a Synology NAS file server during our crew mission to store and share large amounts of computer files, such as crew photography and drone footage, research data, and the Mars Society’s 25+ year archive including all previous MDRS crew reports. Commander James Burk was the Director of Information Technology from 2011-2021 before he assumed his current full-time role as Executive Director. In his previous volunteer role, Commander Burk was responsible for maintaining and archiving past versions of the Mars Society’s online resources including MDRS crew research file, reports, photos, website information and other organizational data going back to the organization’s founding in 1998.
By having an onsite unstructured research database such as this, crews could reference past learnings, EVA plans, research objectives and other useful information during our mission, without having to spend time searching the Internet, which would not be possible in real time on Mars. Having an onsite file server with a vast trove of information would mimic the scenario on Mars, where crews suffer from a comms delay of from 4.3 to 21 minutes, depending on the relative position of Earth and Mars.
The model of server was recommended by Christopher Kozlov of the Mars Society’s Chicago chapter, who is a professional networking and IT architect, currently working as Director of Technology for an academic institution. Kozlov recommended a Synology NAS DiskStation® DS1522+ with Seagate IronWolf drives in a Raid 10 configuration with additional spare hard drives available onsite (or in storage near-site). There was discussion of ruggedizing the setup and building a server cage with air filtration, to prevent the ever-present dust from the Utah desert from entering the device. For this initial test however, in the interest of time and effort for already packed mission prep, we elected to host the file server on a table in the Science Dome and not install anything permanent.
Crew 261 Activities
The server arrived safely and was unboxed and set up on SOL 2. It was qualified for use on SOL 3. Commander Burk also brought several archival hard drives that could be used to seed the server with content.
However, once the server was installed, the crew realized that we have some significant issues with the power system overall, which causes the campus to frequently lose power (see Crew Engineer Julien Villa-Massone’s reports on this.) As a consequence of the ongoing issues, the file server lost power nearly every day and required manual intervention to restart.
Therefore, instead of putting this server into operational use, we focused on improving the power monitoring work, which will be important for the long-term hosting of this or a similar server onsite at the MDRS.
It was not critical to any other experiment to have this onsite server available, as we have cloud-based redundancies for all experiments that were going to use this one. Our crew’s file sharing activities and our permanent storage of research will happen using cloud-based services such as Google Drive, Google Photos, and similar tools.
Forward-Looking Plan
The plan at the end of our mission is to pack up the server and ready it for the beginning of the next field season, when we hope to have some upgrades to the power system to make it more reliable.
COPING STRATEGIES SURVEY
(PI: Andrees Kaoosar, University of Central Florida)
As part of the behavioral study in extreme environments conducted by Andrees Kaoosar, we are completing self-assessment scales to evaluate potential changes in mood, anxiety, and social behavior during our mission. A daily journal entry is also proposed in this study. These daily surveys can help us become aware of our own feelings and better understand them. It can also help improve communication with other team members. Writing down our emotions and interactions is also a way to release emotions and reflect on solutions to manage them more effectively.
The consensus among the participating crew members is that the opportunity to journal daily is welcome. The questions prior to the optional journal entry are consistent from sol to sol, which is helpful. The questions are also brief, which is helpful with busy schedules. Multiple crewmembers reported that this survey had a positive effect on their overall experience while on our mission and helped us deal effectively with our own deep emotions that we experienced during the mission and being with each other.
The results of this study will play a crucial role in our understanding of individual behavioral reactions and their adaptation within a mission-oriented team. They will contribute to optimizing team composition, offering strategies for emotional control, and fostering efficient communication among team members.
PROOF-OF-CONCEPT OF RECON & EMERGENCY DRONE W/ 8K 360 VR CAPABILITIES
(PI: Ali Zareiee, Adapa 360)
Testing of advanced high-performance drone with ability to capture 8k 360 video for playback in virtual reality.
The Adapa 360 team is one of the long-term partners of the Mars Society and its MarsVR project. They are very experienced with building VR-enabled cameras and mounting them to custom-built drones, and have been doing that for over a decade, since before commercial products were available with similar capabilities.
The Adapa team created two high-performance drones with VR-enabled 8K-resolution 360 cameras that were intended for our mission. Crew Engineer Julien Villa-Massone traveled to Spain to meet with the team and test flying the drones. During their meeting, it was determined that we would take the newer and smaller drone, even though it was not a mature platform and did not have adequate testing prior to the mission.
Julien Technical Details on camera issue and any flight characteristics.
SCOUT ROVER
(PI: Cameron Rough, Nexus Aurora)
The Scout, Sample, and Map (SSAM) rover is a prototype of a rapid, cost-efficient, and redundant system for high-fidelity mapping and exploration of mission areas.
As background, Nexus Aurora (NA) is a community based project incubator, whose primary goal is to open source solutions to the complex problems of space settlement. Originally formed as part of the Mars Society’s Mars City State Design Competition in 2020, during the Covid pandemic, the competition was held to create the best plan for a Mars city state of 1,000,000 people. The NA team eventually won the competition, and it’s $10,000 cash prize, and grew and evolved the organization into what it is today.
We began working with the Nexus Aurora team early in our overall mission planning. There were two initial experiment ideas that our crew selected with Nexus Aurora participants as PIs — an autonomous farming experiment that would have created a system to maintain, water, and monitor a single row of crops that would have been a proof-of-concept to scale up to create a kilometer-long automated greenhouse with multiple rows of crops. This idea was worked on by the Nexus Aurora collective for several months with some solid design prototyping activities, but when the Covid pandemic forced us to delay our mission, this team discontinued work.
The second experiment is what is now the Scout Platform which originally started out as a sample collection solution that used multiple small rovers and a base station. The original concept would have our crew deploy the rover system on a EVA, in an interesting location, and the multiple small rovers would autonomously collect several samples and return to the base station, which would be retrieved by the crew on another EVA.
This solution, while innovative, proved difficult to implement, and so the team decided to pivot to the current solution, that of a Sojourner-sized rover with an open hardware platform that is designed to be easily extended multiple instruments and experiments. Essentially, if Scout is realized, it would be the first commercially available Mars rover that can be fully customized for different mission objectives.
Unfortunately, for our mission, Scout was not ready in time to arrive at MDRS prior to the crew, and the Nexus Aurora team ran into some challenges with the logistics of getting a large complex electronics payload from North Carolina to Utah expeditiously. As of the time of this writing, the Scout rover is apparently sitting on a loading dock in Salt Lake City, and we have no estimate of when it will be arriving at our package receiving facility in Hanksville.
Our plan is to work with the upcoming crew, the upcoming University Rover Challenge staff, and the MDRS mission support team to uncrate & set up the rover, and allow the Nexus Aurora team to perform some remote testing at the MDRS before the system is sent back to them.
We are all sad that we were not able to test out the Scout rover during our mission, but we are grateful for all the hard work, support and dedication that the NA team has provided to our crew and to the Mars Society. We as individuals look forward to working with the NA team on future projects.
MARSCOIN NODE WITH BLOCKCHAIN SERVICES
(PI: Lennart Lopin, Marscoin Foundation)
The Marscoin project was started in 2014 by Lennart Lopin with the goal of creating the first digital currency for Mars. It is based on Litecoin, which is based on the initial Bitcoin implementation in 2009. In effect, Marscoin is an early version of Bitcoin, frozen in time, and customized to the specific needs of an early Mars settlement. The Marscoin development team has successfully maintained the Marscoin blockchain since 2014 with no significant issues, and the project is listed on multiple crypto exchanges.
The Marscoin development team has created many software products on top of its stable blockchain, including the Martian Republic, a proof of concept of an eGovernment application that allows citizens to have identity services, direct voting and to save data to the blockchain such as Inventory logging and file attachments. Commander Burk and Crew 261 provided requirements to the Marscoin development team as part of our mission planning that eventually made it into the Martian Republic software.
The intent of our mission was to be the first crew at the MDRS to utilize blockchain technology to track inventory and perform e-voting, using our own native Marscoin node running at the station, along with a console running the Martian Republic application that could be used by any crewmember.
The experiment was envisioned to be running on the File Server with a cloud-based redundancy. Due to the issues with power (see File Server), we chose not to set this up on the File Server and instead we conducted an initial demo of the experience using a cloud instance of the Martian Republic application.
As part of our normal duties, we performed an HSO supplies inventory and a Food Inventory. We saved the results of these inventories into the Marscoin blockchain using the Martian Republic application, successfully becoming the first crew on Mars to use the blockchain for routine functions such as inventory management.
Conclusion
In conclusion, Transatlantic Mars Crew 261 conducted a wide range of experiments and projects aimed at advancing research and technology for future Mars missions. Despite encountering challenges and limitations, the crew made significant progress in various scientific fields and contributed valuable data to the Mars Society and the Mars Desert Research Station (MDRS) program.
The crew successfully conducted experiments such as COSMOS and PASKAL, which focused on cardiovascular monitoring and pharmacology in space. These studies provided valuable insights into the impact of extreme environments on the human body and drug metabolism in space conditions. The BIOSTIMULATION project aimed to enhance plant growth using Spirulina, while the ALGACRAFT project explored the growth of Spirulina in a photobioreactor for potential use in closed-loop life support systems.
The crew also conducted experiments related to astronomy, safety drills, power control systems, coping strategies in extreme environments, and the integration of virtual reality technologies. The outcomes of these experiments and projects included improved understanding of the Sun’s dynamics, enhanced crew safety protocols, advancements in power control systems, and insights into behavioral reactions in extreme environments.
Despite some setbacks, such as the delayed arrival of the SCOUT ROVER and technical issues with the ADAPA 360 drone, the crew remained committed to their mission objectives and expressed gratitude to their partners and collaborators for their support.
The achievements of Crew 261 contribute to the collective knowledge and progress in human space exploration, particularly in the context of future Mars missions. The valuable data and experiences gained during this mission will inform future research and mission planning, and the crew looks forward to continued collaboration and involvement in future projects.

















You must be logged in to post a comment.