


Mission Summary Report
Mars Desert Research Station Crew 211
UCL to Mars
Crewmembers:
Dr. Carl-Henrik Dahlqvist
Simon Collignon
Julien Amalaberque
Eléonore Lieffrig
Nathan Pechon
Chloé Peduzzi
Benjamin Flasse, Maxime Bernard
Scientific Program
Cubelanders swarm (Carl-Henrik Dahlqvist)

Mars presents a dynamical environment that cannot be fully described by measures taken by a small number of probes. In order to get a more comprehensive view of Mars climate evolution, we proposed to rely on miniaturized landers, called CubeLanders that could be deployed on large strand of Mars surface via drones. Those landers would include several scientific instruments to characterize the environment and provide new insights into its evolution. In contrast with CubeSats which could deploy large solar panels and antennas, CubeLanders have a single solar panel covering one of their sides. We, therefore, have to limit as much as possible power consumption especially regarding the information transfer. We relied on an ultra-low power RF transceiver for short range communication and on the creation of a lander communication network to transfer the information to the deployment unit using only nearest neighbors.
The proposed concept has been tested during this rotation 211. The CubeLanders structure has been 3D printed while we used the Arduino platform for the electronic system. An algorithm has been developed in order to transmit the information via the CubeLanders network. It has been successfully tested in the Science Dome before a field experiment near the MDRS campus. The deployment of the Cubelanders have been made via drone using a new fully mechanical capture system composed of a fork attached to the drone and a rail system on the sides of each Cubelanders. The field experiment was a success even if the iron rich soil challenged the communication system.
Simultaneous location and mapping algorithm using a depth camera (Julien Amalaberque)
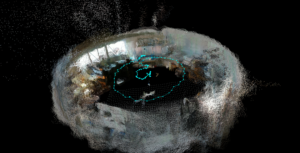
On Mars, the lack of a global positioning system and the unreliability of the magnetic north means that other solutions needs to be found to provide positioning and orientation. To do this for our drones, rovers and EVA suits, we decided to use an innovative algorithm called Simultaneous Location And Mapping, also already used with autonomous cars, with a depth camera (Intel RealSense D435i, released earlier this year). The basis used was RTabmap, an open-source implementation of the algorithm maintained by the University of Sherbrooke (Quebec, Canada). It works by creating a cloud of 3D points by extracting features from the image, and then by statistically computing the difference in position from the previous result.
The first step needed to be tweaked in order to allow feature extraction to work on a red, deserted environment which is very different from the classic urban use cases usually described in literature.
Once this was working well, another problem was that computing differences in position between images is an intensive task for a computer. Different image resolutions and frame-per-second settings had to be thoroughly tested to guarantee a reliable service. As a conclusion, the algorithm and the camera now work very well both inside the station and outside in the field. Its positioning ability can be used to automate the movements any kind of unmanned vehicle or as a tool for astronauts.
Study of Brownian motion of colloidale particles (Eléonore Lieffrig)
The Brownian motion of colloidal particles is the motion of tiny particles in a fluid at rest. Several experiences regarding to that field are currently running in the International Space Station, which offers the unique property of microgravity. The interest in studying the behavior of colloidal particles is that it finds applications in sectors such as environmental sciences, petrochemistry, chemistry and so on, including daily life. For example, we could be able to create a kind of plastics with better possibilities of recycling, or, a bit funnier, a vinaigrette that we would never have to shake for the components to be blended.
We first built hermetic enclosures containing colloidal particles in water. The chosen colloids had the property to absorb light at 540 nm et reemit it at 560 nm. Therefore, a fluorescence microscopy technology allowed us to observe the reemitted light by placing a camera on the trajectory of the beam. That way, we were able to get the course of many particles on camera and then track them one by one to verify certain properties we were expecting. For example, the motion of the colloids is independent with regards to gravity and the position distribution around the initial point is a gaussian curve.
Regarding the Musk observatory, the sun was very calm during our rotation, but we could observe little prominences on SOL 3. It was such a great opportunity to use this telescope.
Muon telescope (Maxime Bernard)

This project is based on the upgrading of a compact telescope based on small and gastight Glass Resistive Gas Chambers (“minigRPC”) build last year by Sophie Wuyckens and is aimed at performing a feasibility study of possible research on Mars geology. The first part of the project will be an improvement of the software used to to collect and analyse the data. The second part will be the eventual refinements we could perform on different parts of the detector to make sure the data we get are the most reliable possible. The third part will consist of the collection of in-field data at the MDRS, and its analysis. The goal will then be to make a study of the muon flux generated by interactions of primary cosmic rays and, if time allows to proceed to a radiography or tomography (3D) of the landscape (mountains, hills, etc.) of the Utah desert with “muography”. This technique is very interesting for planets exploration. For instance, we could radiograph Mars and characterize its interior and tell about the planet evolutionary state and history as well as even finding some places geologically well-adapted places for future colony implantation.
The idea of this year experiment was to compare the data I acquired right before coming to Mars with a brand new gaz mix in order to see if I could see a difference in the Muon count and therefore establish the efficiency of each detector to compare them and see if any modification were to be planed. Unfortunately, it appeared a problem occurred with the gaz mixed as I had way less Muons than expected. Despite a lot of effort to find the source of the problem, I could not find one.
It led me to the fact that it must be the gaz mix that was not efficient enough.
Martian constitution (Nathan Pechon)
Our research consisted in the drafting of a Martian constitution. As of today, no rules or legislation apply to Mars. However, law is necessary to organize the human society, as Martian missions are going to grow in scope.
We drafted it together with the crew because a text of such importance needs to gather all different opinions in order to be as democratic as possible. Nevertheless, Nathan played a central role in it. His project consisted in writing articles and submitting them to the crew for a vote. Of course, he took into consideration the crew’s opinions and he was very thankful for every idea coming from them.
Finally, we adopted 20 articles which are applicable on Mars. The Crew was very enthusiastic about debating them.
Geolocation with UWB antennas (Simon Collignon)

Here on Earth, GPS technology brought various tools to our society in a wide tech area. Up there on Mars, it might be as useful to implement GPS-like devices and keeping track of what’s going on in our new Martian civilization. Nowadays, there are different geolocation technologies for different purposes. In regard of the relatively small size of our facilities and the precise experiments undertaken, the most relevant setup is the one which maximize accuracy at the expense of the detection range. Using this configuration, we will be able to monitor near EVA, conducted by our astronauts and rovers.
The system required to meet those specifications is based on the emerging UWB (Ultra Wide Band) technology, brought by the IoT field. It will help us to develop an accurate geolocation system capable of tracking multiple devices of interest on our experiment site. In a further stage, the system could be extended for a wider UWB coverage.
In conclusion we achieved good results for tracking items in the science dome and in an outdoor environment. We collected a large amount of tracking data which will be further analyzed with more advanced post-processing technics. Moreover, we were able to visualize in real time the location of our tracked item during our experiments.
Sleep study (Benjamin Flasse)

A correct and regular sleep is essential for the recuperative power of the crew. For a long-term mission, the recuperative power is crucial for the preservation of the reflexes, the cognitive functions and the general health of the members of the crew. The harsh conditions of such a mission which are among others the stress, the confinement, the lack of privacy, the seclusion and the closeness with the team 24 hours a day, could have a serious impact on the quality of the sleep and of the health of the members of the team.
This is why I analyzed the quality of sleep and the general health condition of the crew, through complete polysomnography (DREAM from MEDATEC), actimetry (E-tact from Bodycap), Critical Flicker Fusion Frequency (B-checkers), neuropsychometric tests (physiopad + MARES) and body parameters analysis (BiodyXpert).
Each morning and each night, each member of the crew went through a quick poll of tests enumerated here above, and 2 crew members were analyzed at night with a DREAM monitoring device. This machine allows to perform a complete polysomnography, they were wearing it every two nights. Since the DREAM analysis will be scored by a doctor in Belgium, I am not able to give any conclusion yet concerning the sleep quality. The other tests will continue in the few days following the mission, but some preliminary observations can be noted.
Firstly, every member of the crew can witness of an increasing fatigue during the mission, even so that naps had to be taken by some members. The weight and the measurements of the crew members does show a loose of body mass during the mission, even though this last one was probably affected by the unusual diet. The percentage of fat mass decreased while the percentage of muscle mass appeared to stay constant. Unsurprisingly, the stress and the brain fatigue appeared to be higher than in normal conditions. Some crew member experienced a water retention a few day after the beginning of the mission. No noticeable change was monitored concerning the cerebral arousal.
Spirulina as space food (Chloé Peduzzi)

As water is a limiting factor on Mars, lots of questions related to how to grow food on the Red Planet remain unsolved. On this purpose, current scientific researches focus on developing technologies to grow highly nutritive food requiring small amount of water. One possible option is spirulina! Indeed, those cyanobacteria are highly prospective for astronauts’ alimentation during future martian explorations. Not only can it be taken as a dietary supplement enriched in proteins, but it has also therapeutic properties. In that sense, we propose to establish a spirulina culture during our mission. The experiment will study the effect of space mission conditions on the culture system, including the small amount of space, materials and water available, the monitoring of the system and finally considering alternatives to improve the culture in such conditions.
10 spirulina cultures were prepared in 10 cell culture flasks. An artificial lightening made by white led was placed behind those culture flasks according to 2 different treatments (24h of light/day and 12h of light/day). The spirulina cultures were agitated manually each day. Cells were checked regularly using a microscope at various cultures’ stages. The cultures were observed at magnification 40X, 100X and 400X. Those observations confirmed the spiral shape of the spirulina’s trichomes. Resulting from HCO3 depletion through photosynthesis, the culture pH tended to rise continuously throughout the 2 weeks of simulation. This rise is positively correlated with the photosynthetic efficiency of the spirulina strain in the operational conditions of the experiment. The temperature variations throughout the 2 weeks of simulation were monitored continuously in the Science dome. The optimum temperature for spirulina growth is around 26°C-32°C (79F-90F) and should not exceed 38°C (100F). The contamination of the culture was monitored using axenicity tests in petri dishes. At the end of the 2 weeks of simulation, all spirulina cultures were harvested. Harvest occurred in the morning as temperature is the coolest and the proteins content (%) in the spirulina is the highest at this time of day. The filtration of spirulina cultures was easily accomplished by passing the culture through a PVC and polypropylene screen (40 microns in mesh size), using gravity as the driving force. The harvested spirulina was then washed with distilled water several times. Spirulina was carefully collected with a sterile spatula and stored on filter papers in petri dishes and was dried at 45°C during 5h. Finally, the wet and dry weight were measured for each of the 10 spirulina cultures. Further analyses will enable us to measure the protein content of the harvested spirulina.
Enhancing leguminous plant nutrition via mycorrhiza symbiosis in a Martian simulated environment ( Chloé Peduzzi)
As a one-way trip to Mars is estimated at 6 months at the shortest, a round-trip mission to the Red planet could last years. Therefore, setting up technologies to grow food in complete autonomy seems crucial. One main issue remains enhancing plant nutrition and increasing their resistance to stress and drought.
To elucidate that point, we propose to study beneficial mycorrhizal fungi connecting with plant roots and forming a network of fungal fibres, bringing water and nutrients to the plant. They support the plant for its entire life and improve yield. On one hand, we will study how this network develops in a Martian simulated soil. On the other hand, we will measure the effectiveness of the symbiosis with a leguminous plant in such conditions. Through this research, we aim to expand scientific knowledges on how Martian conditions affect symbiotic relationships between terrestrial organisms.
Seeds (bean + tomato) were soaked into water for 24h. Soil samples were collected in the Utah desert and were sieved. 16 treatments were repeated 4 times and placed into the GreenHab. The treatments were the followings: Irrigation (dry – Wet), Treatment (control – mycorrhiza – hydrogel – mycorrhiza + hydrogel) and Soil (50% Martian soil + 50% Compost – Compost). This part lasted 10 days. Then plants were harvested. Several crucial measures were taken. Further analyses with the harvested plants will enable us to quantify the mycorrhizal colonisation of the roots.
| Treatment : | Treatment | Soil : | Humidity |
| N°1 | Control | 50% Mars +
50% Compost |
Humid |
| N°2 | Control | 50% Mars +
50% Compost |
Dry |
| N°3 | Control | Compost | Humid |
| N°4 | Control | Compost | Dry |
| N°5 | Mycorrhize | 50% Mars +
50% Compost |
Humid |
| N°6 | Mycorrhize | 50% Mars +
50% Compost |
Dry |
| N°7 | Mycorrhize | Compost | Humid |
| N°8 | Mycorrhize | Compost | Dry |
| N°9 | Hydrogel | 50% Mars +
50% Compost |
Humid |
| N°10 | Hydrogel | 50% Mars +
50% Compost |
Dry |
| N°11 | Hydrogel | Compost | Humid |
| N°12 | Hydrogel | Compost | Dry |
| N°13 | Mycorrhize + Hydrogel | 50% Mars +
50% Compost |
Humid |
| N°14 | Mycorrhize + Hydrogel | 50% Mars +
50% Compost |
Dry |
| N°15 | Mycorrhize + Hydrogel | Compost | Humid |
| N°16 | Mycorrhize + Hydrogel | Compost | Dry |
Table 1: 16 treatments testing Mycorrhiza-Leguminous plant symbiosis in martian condition
Mission Overview
Crew 211 is the 9th crew of the UCL to Mars project. UCL to Mars is a non-profit organization that sends researchers and students from the Université de Louvain to the Mars Desert Research Station. The objective of UCL to Mars is twofold, organize annual research stay at the MDRS and promote science to a younger audience through publication in the press and on social media as well as conferences in universities and schools. Both objectives have been fulfilled during this rotation 211, as we have had the opportunity to welcome schoolchildren on the 24th of April and a PBS crew on the 29th of April to increase awareness of the MDRS and its mission and more broadly to promote Science. Beyond these visits, we conducted successfully nine scientific experiments in various fields of Sciences to answer concrete problems that future space travelers may encounter. Thanks to the variety of profiles we had in our team this year, we adopted an interdisciplinary approach to many problems, bringing added values for several experiments.






You must be logged in to post a comment.